How mechatronics design improves motion system performance >
Discover how mechatronics design boosts motion system performance by integrating servo systems and control for faster commissioning and integrated motion.

Interview with Kollmorgen AMS's Simon Bokesand on the Cyber Resilience Act >
The Cyber Resilience Act introduces several deadlines, including the September 11, 2026 start of mandatory vulnerability and incident reporting and December 11, 2027 full CRA compliance becomes mandatory for product with digital[BS1.1][MM1.2]…

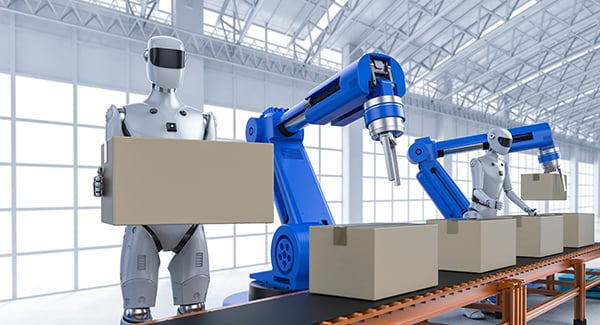
Mastering Multi-Axis Motion Control in Modern Production Cells >
When motion systems scale, synchronization gets harder. Learn how modern production cells maintain precision, stability and throughput at speed.

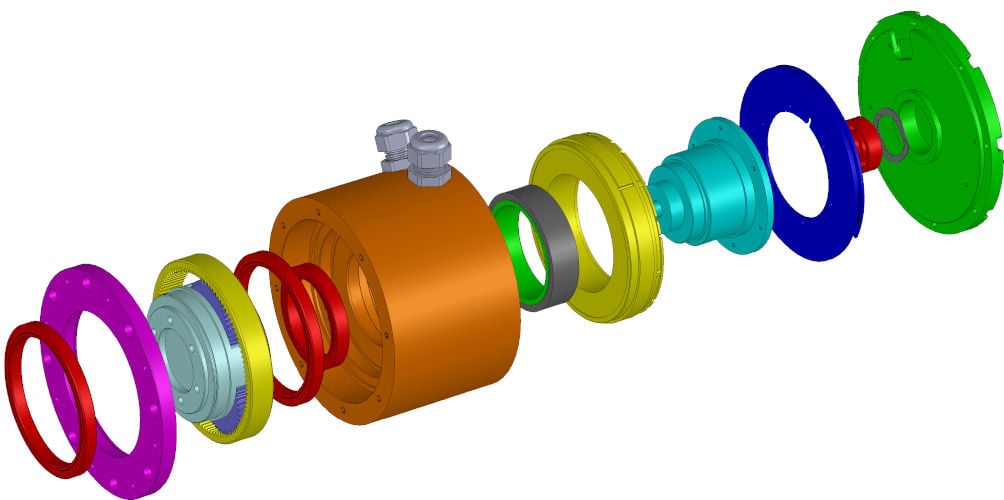
Optimizing Robotic Arm Actuators for Articulated Motion >
Why robotic arm actuator performance depends on more than motor selection, and how to optimize performance at the system level.

How can redundant servo feedback ensure fail-safe positioning when encoder failure isn’t an option? >
In medical devices, defense systems and many industrial applications, failure of the motion system is not an option. Learn how servo motors with integrated, redundant feedback devices simplify the challenge of assuring total motion reliability. Learn…

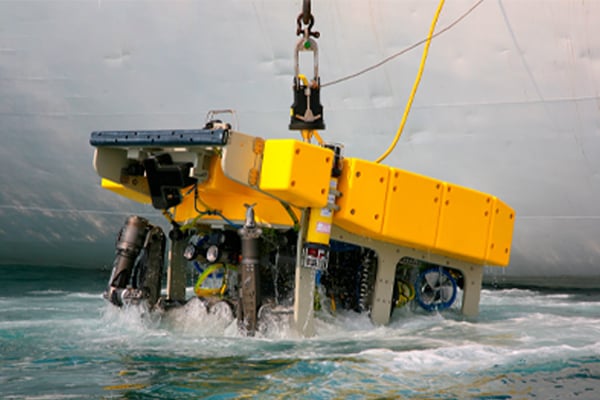
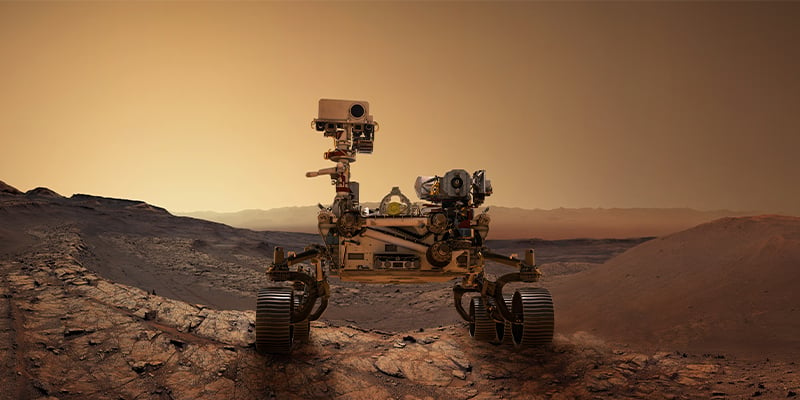
How to design EO/IR motion control that survives harsh environments: 5 conditions to plan for >
Electro-Optical/Infrared (EO/IR) Systems are used to provide long distance visual and thermal imaging for a variety of applications. Often used in satellites, planes, and military applications, there are two main components found in EO/IR systems:…

How to improve reliability in high-temperature down-hole BLDC motors: a practical guide >
There is a lot of energy [pun intended, sorry] going into the design of next generation, high temperature, Down-Hole motor technology at Kollmorgen. The existing motor technology available in the marketplace has basically been the same since the…

AKME vs. Goldline: Which Motor Should You Choose for Your Hazardous Location Application? >
The new AKME Series for hazardous locations brings ATEX and IECEx certifications, unprecedented compactness and versatility. Compare AKME against Goldline EB.

Frameless Motors for Military Minesweeping UGVs: Power, Size & Reliability >
Frameless motors for tracked Unmanned Ground Vehicles (UGVs) in minesweeping maximize torque density, reduce size and ensure reliable performance in extreme environments.

Motion Design for Next-Generation Armored Fighting Vehicles >
Learn what to consider when designing for next-gen armored fighting vehicles, from electromechanical motion architectures to mission-critical performance.

Feedback Devices: Exploring Hall-Effect Sensors and Resolvers >
Hall-effect sensors and resolvers are both popular choices for providing feedback on servo motor positioning. Each has its strengths and limitations. Learn how they work and how to choose the right feedback device for your application.