Come ottimizzare il controllo del movimento motion multiasse nelle moderne celle di produzione >
Quando i sistemi di motion aumentano di scala, mantenere la sincronizzazione diventa sempre più difficile. Scopri come le moderne celle di produzione mantengono precisione, stabilità e produttività anche a velocità più elevate.

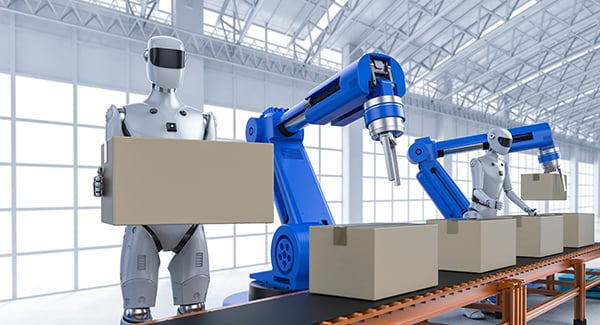
Ottimizzare gli attuatori per bracci robotici a movimento articolato >
Le prestazioni degli attuatori per bracci robotici non dipendono solo dalla scelta del motore: scopri quali fattori incidono maggiormente e come ottimizzarli attraverso un approccio sistemico.

AKME vs. Goldline: quale motore scegliere per le applicazioni in ambienti pericolosi? >
La nuova Serie AKME per ambienti a rischio offre certificazioni ATEX e IECEx, oltre a compattezza e versatilità senza precedenti. Confronta la Serie AKME con EB Goldline.

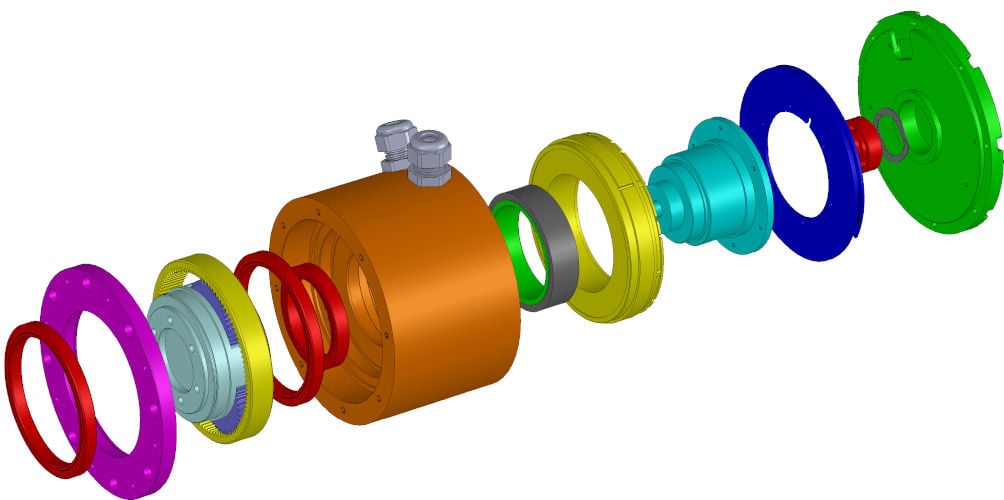
Motori frameless per UGV militari per lo sminamento: potenza, compattezza e affidabilità >
I motori frameless per veicoli terrestri senza pilota (UGV) cingolati impiegati nella bonifica di mine garantiscono elevata densità di coppia, compattezza e prestazioni affidabili anche negli ambienti più estremi.

Motion design per veicoli da combattimento corazzati di ultima generazione >
Scopri cosa considerare nella progettazione dei veicoli da combattimento corazzati di nuova generazione: dalle architetture di motion elettromeccanico alle prestazioni mission-critical.

Dispositivi di retroazione: Analizzare i resolver e i sensori a effetto Hall >
I resolver e i sensori a effetto Hall sono scelte popolari per fornire retroazione sul posizionamento del servomotore. Entrambi hanno punti di forza e limitazioni. Scopri come funzionano e come scegliere il dispositivo di retroazione ideale per la…

Dispositivi di feedback: esplorazione degli encoder sinusoidali lineari e rotativi >
Gli encoder lineari, rotanti e sinusoidali forniscono la retroazione della posizione ad altissima risoluzione per i servosistemi che richiedono precisione assoluta. Ma non sono necessariamente la scelta migliore per ogni applicazione. Scopri come…

Dispositivi di retroazione: una panoramica sulla posizione dei dispositivi, sui tipi di retroazione e sulle tecnologie disponibili >
La tua scelta del dispositivo di retroazione è essenziale per raggiungere la precisione e l'affidabilità del servosistema. Scopri le opzioni di retroazione e i criteri di selezione chiave.

Quali sono le differenze tra servomotori CC, BLDC e CA? >
Comprendi le differenze tra servomotori CC, servomotori BLDC e servomotori CA. Scegliere il tipo giusto per la tua applicazione è fondamentale per ottenere livelli ottimali di prestazioni, efficienza e longevità.
5 errori da evitare quando si seleziona un sistema passo-passo >
I sistemi passo-passo possono essere efficienti, potenti e silenziosi, ma solo se realizzati correttamente. Quando si specificano azionamenti e motori passo-passo, ecco 5 errori comuni da evitare e 5 migliori pratiche da implementare, accelerando lo…

Feedback ridondante del servomotore: quando il posizionamento a prova di guasto è indispensabile >
Nei dispositivi medici, nei sistemi di difesa e in molte applicazioni industriali, il guasto del sistema di motion non è un'opzione. Scopri come i servomotori con dispositivi di feedback integrati e ridondanti semplificano la sfida di assicurare la…