






Parlando di servomotori e servosistemi si potrebbe incontrare il termine "sistema ad anello chiuso". Se ti stai chiedendo cosa significa e come funziona, sei capitato nel posto giusto. Analizziamo alcune delle domande più comuni.
Cos'è un anello chiuso? Gli anelli non sono sempre chiusi?
Pensa ad alcuni anelli che ci sono familiari, montagne russe, circuiti motoristici, anelli per chiavi: condividono tutti una caratteristica fondamentale, ovvero la fine coincide con il principio. Lo stesso concetto si può applicare agli anelli di asservimento. Il sistema di controllo invia un comando all'azionamento; l'azionamento trasmette la potenza al motore; e la risposta del motore, velocità e posizione, viene comunicata nuovamente al sistema di controllo chiudendo l'anello. L'obiettivo è far corrispondere retroazione e comando.
Tecnicamente parlando, cosa chiude un anello di un servomotore?
Per rispondere in una parola i tecnici spesso parlano di "retroazione", ma questo è vero solo in parte. I sistemi ad anello chiuso si basano su dispositivi che erogano coppia, velocità e retroazione di posizione, ma l'anello viene chiuso solo dopo che il controllo fa qualcosa con i dati di retroazione.
Ad esempio, il controllo dell'azionamento emette un comando, o meglio un obiettivo, che dice all'azionamento di spostare il motore a 1.500 giri/min. L'azionamento alimenta il motore e il motore reagisce. Ma se il dispositivo di retroazione comunica al controllo che il motore si sta spostando solo a 500 giri/min, il controllo dell'azionamento registra un errore. È qui che si trova il cuore del servosistema. Una volta riconosciuto che 500 giri/min non è un valore corretto, il controllo dell'azionamento esegue un nuovo calcolo per conoscere cosa servirebbe per far girare il motore a 1.500 giri/min e regola la corrente di conseguenza.
Quindi cosa accade all'interno dell'azionamento per chiudere l'anello di controllo della retroazione?
L'anello viene chiuso quando i dati di retroazione immettono una giunzione di somma nel sistema di controllo che calcola un errore, la differenza tra il valore obiettivo e quello effettivo, e il controllo dell'azionamento emette un nuovo comando a compensazione. Tutto questo può avvenire molto rapidamente, centinaia di volte più rapidamente rispetto a un battito di ciglia, e il processo si ripete continuamente.
Ma se desidero regolare qualcos'altro, come coppia o posizione rispetto al controllo di velocità?
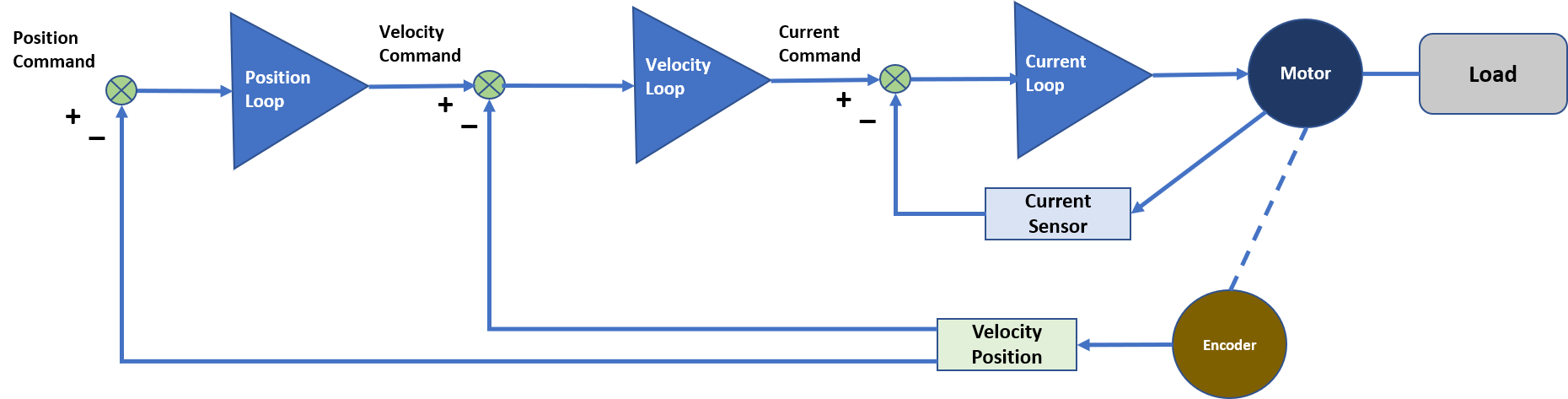
Per un sistema servoassistito esistono vari anelli. L'anello primario è l'anello della corrente. La corrente si trasforma in coppia nel motore. L'anello della corrente nell'azionamento riceve un comando e invia quindi la corrente al motore. Il dispositivo di rilevamento all'interno dell'azionamento misura la corrente e rinvia il valore nella giunzione di somma. Se esiste un errore, l'azionamento si regola per correggere la corrente. Ma cosa accade se il valore obiettivo della corrente non è quello giusto per ottenere l'obiettivo di velocità e/o posizione? Per questo motivo sono presenti altri anelli.
Il secondo anello è quello della velocità. La retroazione per questo anello è tipicamente collegata al motore o all'oggetto in movimento. La retroazione viene rinviata al controllo dell'azionamento. La differenza in questo caso è che, se esiste un errore di velocità, il controllo emette un nuovo comando di corrente nell'anello primario della corrente. In altre parole, l'anello della velocità immette il suo errore nell'anello della corrente. Con la variazione della corrente varia la velocità e i due anelli esaminano i dati di retroazione alla ricerca di errori.
Il terzo anello è quello della posizione. Come si può immaginare, il processo è lo stesso. Il confronto tra obiettivo di posizione e posizione effettiva determina un errore di posizione che viene inviato all'anello di velocità come nuovo comando. L'anello della velocità funziona come descritto in precedenza per fornire una corrente obiettivo. I tre anelli funzionano simultaneamente per raggiungere l'obiettivo di posizione.
Per sintetizzare, al fine di regolare posizione, velocità, coppia o un altro parametro di sistema quale pressione o tensione, deve essere presente una retroazione associata in uno degli anelli di controllo in modo che l'anello possa essere chiuso.
Se in questo caso parliamo di un sistema ad anello chiuso, può esistere un sistema ad anello aperto?
Sebbene sia normale parlare di circuito aperto, lo si può considerare un termine improprio perché in effetti significa "assenza di anello". La realtà è che l'anello non esiste finché non lo chiudiamo con la retroazione.
In un sistema ad anello aperto si può prevedere l'esito, ma non si sa cosa accada al carico poiché non è un valore misurabile. Si potrebbe prendere un sistema intrinsecamente ad anello aperto, come un motore passo-passo, e aggiungere un dispositivo di retroazione per la posizione o la velocità. Essenzialmente si riconosce l'esistenza di anelli potenziali e li si chiude. Questo accade e per questo motivo si possono vedere dispositivi di retroazione per i motori passo-passo, di norma con l'espressione "analogo a un servosistema" da qualche parte nella descrizione dei prodotti.
Ma a questo punto il problema diventa, se si prende un motore passo-passo e si chiudono uno o più anelli:
fin dove si deve arrivare con un servosistema?
Bella domanda. È qui che dovresti pensare a consultare un esperto di motion per discutere le esigenze specifiche della tua applicazione.








