





Dans sa forme élémentaire, un servosystème est composé d'un actionneur (le muscle), d'un appareil de commande (le cerveau) et d'un élément d'asservissement (les sens). Dans le monde de l'automatisation, le muscle peut être représenté par divers mécanismes, mais il s'agira la plupart du temps d'un servomoteur. Le cerveau peut être lui aussi représenté par différents éléments, mais il s'agit habituellement d'un contrôleur de mouvement ou servovariateur. Le sens fournit des informations d'asservissement au cerveau par le biais d'un capteur de courant et/ou d'un codeur, d'un résolveur, voire d'un système de vision.
Lorsque l'appareil de commande envoie à l'actionneur un signal lui demandant d'atteindre une position spécifique, l'actionneur commence à se déplacer, et le capteur d'asservissement informe le contrôleur sur la direction et la vitesse de déplacement de l'actionneur. Le contrôleur analyse alors les informations d'asservissement et détermine si le moteur a atteint la position demandée. Si ce n'est pas le cas, l'appareil de commande demande à l'actionneur de continuer à se déplacer jusqu'à ce qu'un signal du capteur d'asservissement l'informe que le moteur a atteint la position souhaitée.
 Comme le corps humain, le servosystème est un remarquable système de mouvement multiaxe composé de centaines de « muscles », d'une multitude de capteurs d'asservissement et d'un système de commande qui effectue rapidement les ajustements nécessaires. Prenons l'exemple d'un match de baseball : lorsqu'un joueur se présente sur le marbre pour frapper la balle, le cerveau analyse la situation, le nombre de joueurs sur la base, le nombre actuel de retraits, la position de la défense, etc. Le batteur regarde le coach de 3e base et reçoit le signal lui demandant de frapper la balle (l'image passe des yeux au cerveau). Lorsque le lanceur lance la balle, le batteur anticipe le lancer et essaye de prévoir l'endroit où la balle traversera le marbre. Lorsque le lanceur envoie la balle, les yeux du batteur transmettent l'information au cerveau, qui analyse la trajectoire de la balle, prend des décisions en une fraction de seconde, envoie des signaux à différents muscles et coordonne le swing de la batte pour frapper précisément la balle. Si le batteur manque la balle, le cerveau analyse l'erreur afin d'être prêt à affronter le prochain lancer. Le corps humain, à l'instar d'un servosystème, suit une chorégraphie précise et coordonnée. Les servosystèmes industriels modernes ont beaucoup évolué et comprennent désormais des contrôleurs complexes, composés d'une multitude de capteurs d'asservissement et de processeurs rapides qui décident en quelques nanosecondes d'effectuer le mouvement souhaité. Un servosystème industriel type est composé des éléments suivants :
Comme le corps humain, le servosystème est un remarquable système de mouvement multiaxe composé de centaines de « muscles », d'une multitude de capteurs d'asservissement et d'un système de commande qui effectue rapidement les ajustements nécessaires. Prenons l'exemple d'un match de baseball : lorsqu'un joueur se présente sur le marbre pour frapper la balle, le cerveau analyse la situation, le nombre de joueurs sur la base, le nombre actuel de retraits, la position de la défense, etc. Le batteur regarde le coach de 3e base et reçoit le signal lui demandant de frapper la balle (l'image passe des yeux au cerveau). Lorsque le lanceur lance la balle, le batteur anticipe le lancer et essaye de prévoir l'endroit où la balle traversera le marbre. Lorsque le lanceur envoie la balle, les yeux du batteur transmettent l'information au cerveau, qui analyse la trajectoire de la balle, prend des décisions en une fraction de seconde, envoie des signaux à différents muscles et coordonne le swing de la batte pour frapper précisément la balle. Si le batteur manque la balle, le cerveau analyse l'erreur afin d'être prêt à affronter le prochain lancer. Le corps humain, à l'instar d'un servosystème, suit une chorégraphie précise et coordonnée. Les servosystèmes industriels modernes ont beaucoup évolué et comprennent désormais des contrôleurs complexes, composés d'une multitude de capteurs d'asservissement et de processeurs rapides qui décident en quelques nanosecondes d'effectuer le mouvement souhaité. Un servosystème industriel type est composé des éléments suivants :
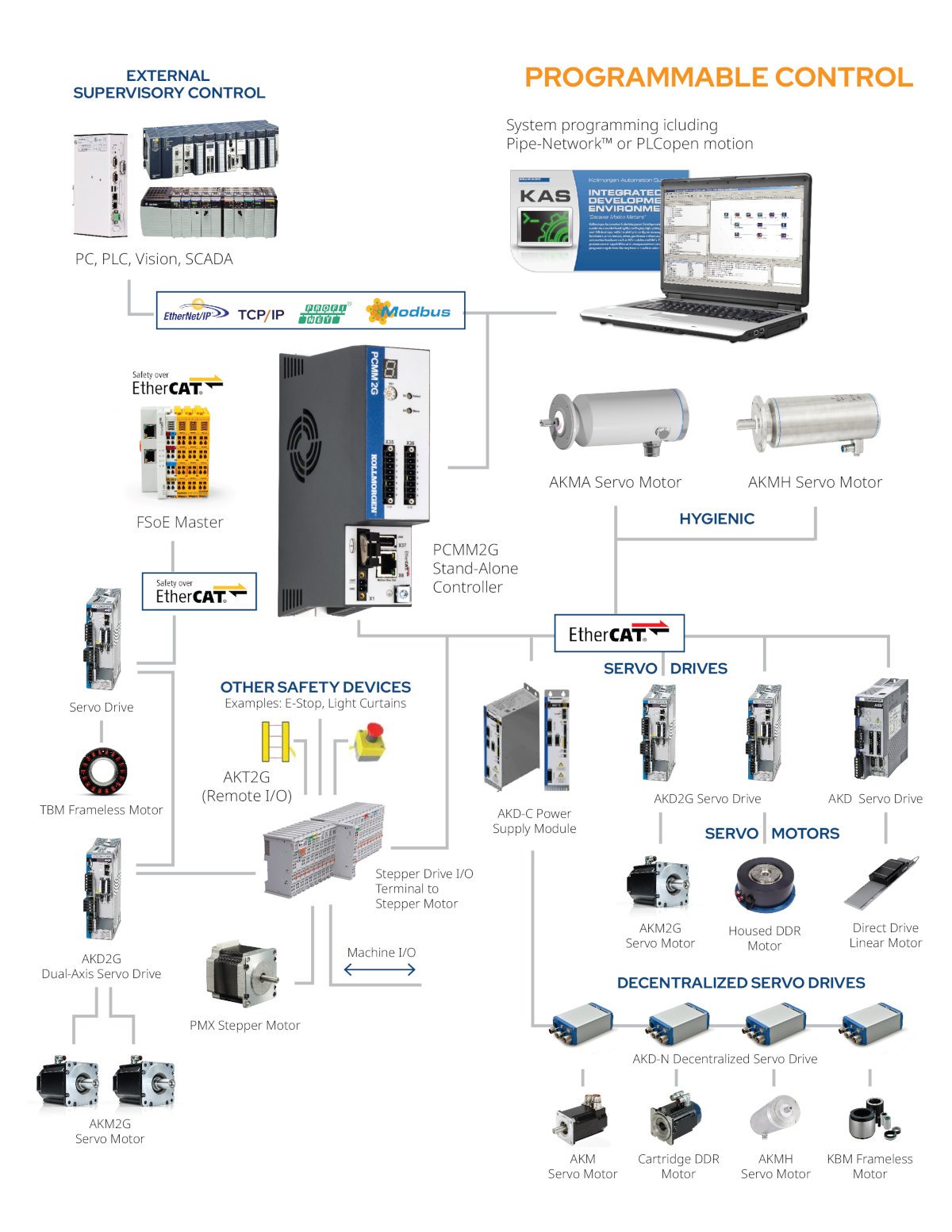
- Servomoteur : le muscle du système, disponible en différentes technologies, avec ou sans balais, avec ou sans boîtier, linéaire ou rotatif. Le moteur produit le couple requis pour accélérer et déplacer la charge.
- Servovariateur : le cerveau du système, ou une partie de celui-ci. Les servovariateurs simples peuvent commander le couple et/ou la vitesse alors que les modèles plus sophistiqués présentent des fonctionnalités supplémentaires et peuvent être configurés en tant que positionneurs dotés de capacités de programmation. Un variateur ou contrôleur, adapté au servomoteur, régule la tension et le courant envoyés au moteur.
- Servocontrôleur : cerveau du système, il utilise un environnement de programmation permettant de choisir différentes options de commande de la machine et de fonctionnement des entrées et sorties. Il est interconnecté avec une interface utilisateur graphique. Les servocontrôleurs peuvent être autonomes ou intégrés aux servovariateurs.
- Asservissement : les sens du système, habituellement intégrés dans le servomoteur. L'élément d'asservissement peut être un codeur, un résolveur, un capteur d'asservissement linéaire, un tachymètre, etc. Les systèmes de commande sophistiqués peuvent inclure plusieurs solutions d'asservissement avancées telles qu'un système de vision.
- Câblage : le servosystème est interconnecté, de sorte que le câblage d'asservissement, de communication et d'asservissement de l'alimentation forme le système nerveux qui relie le cerveau, les muscles et les sens.
Pour choisir le bon jeu de composants d'un servosystème, il convient d'analyser soigneusement les besoins de performance du système. La quantité de « muscles » requis détermine la taille du servomoteur, ce qui à son tour affecte le choix du servovariateur. La précision de l'application est un facteur important dans le choix de l'asservissement, notamment en ce qui concerne le type et la résolution du capteur d'asservissement. Le niveau de coordination entre les autres appareils du système, ainsi que la réponse requise, détermine le choix du contrôleur requis.
Ce travail de rassemblement des composants nécessaires peut demander beaucoup de temps et d'efforts. Travailler avec un expert du contrôle de mouvement comme Kollmorgen facilite et accélère le choix du servosystème et permet de trouver la configuration optimale pour l'application.








