





Nella sua forma di base un servosistema è costituito da un attuatore (i muscoli), da un dispositivo di controllo (il cervello) e da un elemento di retroazione (i sensi). Nel mondo dell'automazione, mentre i muscoli possono essere rappresentati da svariati meccanismi, nella maggior parte dei casi si tratta di un servomotore. Anche il cervello può essere rappresentato da svariati elementi, ma di solito si tratta di un controller di movimento o un servoazionamento. I sensi inviano informazioni di retroazione al cervello attraverso un sensore di corrente e/o un encoder, un resolver o anche un sistema di visione.
Quando il dispositivo di controllo invia un segnale all'attuatore per lo spostamento in una posizione specifica, l'attuatore inizia a spostarsi e il dispositivo di retroazione segnala al controller dove e a quale velocità si sta spostando l'attuatore. Il controller riesamina quindi la retroazione e determina se il motore ha raggiunto la posizione desiderata. In caso contrario il dispositivo di controllo continua a segnalare all'attuatore di spostarsi finché non riceve dal dispositivo di retroazione un segnale che indica che il motore ha raggiunto la disposizione desiderata.
 Il servosistema opera in modo molto simile ai processi del corpo umano, un eccellente sistema di motion multiasse costituito da centinaia di muscoli, vari dispositivi di retroazione e un sistema di controllo che esegue rapide regolazioni. Per fare un esempio, un giocatore di baseball va al piatto della casa base per colpire in battuta e il suo cervello analizza la situazione che ha di fronte, il numero di giocatori alla base, il numero di strike e la posizione della difesa. Il battitore dà un'occhiata al coach in terza base e riceve il segnale per colpire la palla (l'immagine passa dagli occhi al cervello). Quando il lanciatore lancia la palla, il battitore anticipa il lancio e cerca di prevedere dove la palla attraverserà il piatto. Quando il lanciatore lascia la palla, gli occhi del battitore inviano le informazioni al cervello, il quale analizza il volo della palla, modifica la sua decisione, invia segnali a vari muscoli e coordina il movimento della mazza per colpire la palla con precisione. Se il battitore manca la palla, il cervello analizza l'errore per modificare il movimento per il lancio successivo. Come un servosistema, il corpo umano lavora secondo un movimento preciso e coordinato. I moderni servosistemi in ambito industriale hanno fatto molti progressi e includono oggi controller complessi con vari dispositivi di retroazione e processori rapidi che prendono decisioni nel giro di qualche nanosecondo per eseguire il movimento desiderato. In dettaglio un tipico servosistema in ambito industriale include:
Il servosistema opera in modo molto simile ai processi del corpo umano, un eccellente sistema di motion multiasse costituito da centinaia di muscoli, vari dispositivi di retroazione e un sistema di controllo che esegue rapide regolazioni. Per fare un esempio, un giocatore di baseball va al piatto della casa base per colpire in battuta e il suo cervello analizza la situazione che ha di fronte, il numero di giocatori alla base, il numero di strike e la posizione della difesa. Il battitore dà un'occhiata al coach in terza base e riceve il segnale per colpire la palla (l'immagine passa dagli occhi al cervello). Quando il lanciatore lancia la palla, il battitore anticipa il lancio e cerca di prevedere dove la palla attraverserà il piatto. Quando il lanciatore lascia la palla, gli occhi del battitore inviano le informazioni al cervello, il quale analizza il volo della palla, modifica la sua decisione, invia segnali a vari muscoli e coordina il movimento della mazza per colpire la palla con precisione. Se il battitore manca la palla, il cervello analizza l'errore per modificare il movimento per il lancio successivo. Come un servosistema, il corpo umano lavora secondo un movimento preciso e coordinato. I moderni servosistemi in ambito industriale hanno fatto molti progressi e includono oggi controller complessi con vari dispositivi di retroazione e processori rapidi che prendono decisioni nel giro di qualche nanosecondo per eseguire il movimento desiderato. In dettaglio un tipico servosistema in ambito industriale include:
- Servomotore: i muscoli del sistema, disponibile in svariate tecnologie tra cui con spazzole o brushless, con alloggiamento o frameless, lineare o rotativo. Il motore produce la coppia necessaria per accelerare e spostare il carico.
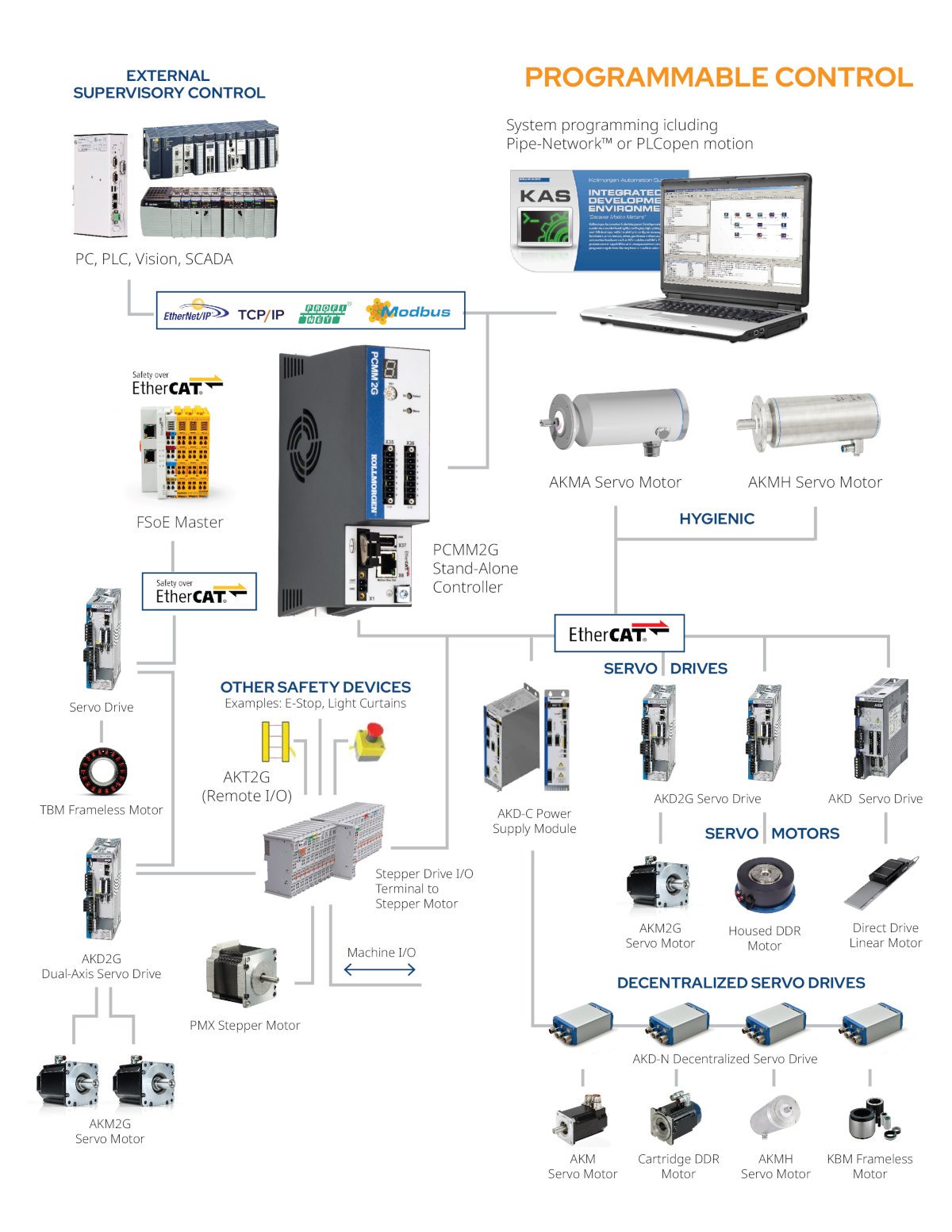
- Servoazionamento: può essere il cervello o una parte del cervello del sistema. Servoazionamenti semplici possono controllare coppia e/o velocità, mentre servoazionamenti di livello superiore offrono caratteristiche supplementari e possono essere configurati come posizionatori con funzionalità di programmazione. Un azionamento o controller, abbinato al servomotore, controlla la tensione e la corrente ricevute dal motore.
- Servocontroller: il cervello del sistema, utilizza un ambiente di programmazione per consentire svariate opzioni per il controllo della macchina e il funzionamento di input e output, ed è interconnesso ad un tipo di interfaccia grafica utente. I servocontroller possono essere autonomi o integrati ai servoazionamenti.
- Retroazione: i sensi del sistema, generalmente è integrata nel servomotore. L'elemento di retroazione può essere costituito da un encoder, un resolver, un dispositivo di retroazione lineare, un tachimetro, ecc. Sistemi di controllo sofisticati possono includere forme più avanzate di retroazione quali sistemi di visione.
- Cablaggio: il servosistema è interconnesso e quindi i cavi di retroazione, comunicazione ed alimentazione rappresentano il sistema nervoso che collega tra loro cervello, muscoli e sensi.
La scelta del giusto set di componenti di un servosistema richiede un'attenta analisi dei requisiti prestazionali del sistema. La quantità di “muscoli” necessari determinerà la taglia del servomotore, il che a sua volta influisce sulla scelta del servoazionamento. La precisione dell'applicazione gioca un ruolo nella scelta della retroazione, nello specifico per la tipologia e la risoluzione del dispositivo di retroazione. Il livello di coordinamento tra altri dispositivi del sistema, insieme alla risposta richiesta, determinerà il tipo di controller richiesto.
La combinazione di tutti questi aspetti può essere un compito gravoso. La cooperazione con esperti di motion control quali Kollmorgen rende più semplice e rapida la scelta di un servosistema, creando un sistema ottimale per l'applicazione.








