






Em sua forma básica, um sistema servo consiste em um atuador (os músculos), em um dispositivo de controle (o cérebro) e em um elemento de feedback (os sentidos). No mundo da automação, ainda que os músculos possam ser uma variedade de mecanismos, eles são frequentemente representados por um servomotor. O cérebro também pode ser representado por uma variedade de elementos, mas geralmente é um controlador de movimento ou um servodrive. Os sentidos fornecem informações de feedback para o cérebro por meio de um sensor de corrente e/ou por meio de um encoder, resolver ou até mesmo de um sistema de visão.
Quando o dispositivo de controle envia um sinal para o atuador se mover para uma posição específica, o atuador começa a se mover, e o dispositivo de feedback sinaliza de volta ao controlador qual a velocidade e para onde o atuador está indo. Em seguida, o controlador analisa o feedback e determina se o motor atingiu a posição comandada. Se não, o dispositivo continuará a sinalizar o atuador para que ele se movimente até receber um sinal do dispositivo de feedback de que o motor atingiu a posição desejada.
 O sistema servo opera de forma parecida com os processos do corpo humano – um sistema notável de movimento multieixo de centenas de músculos, diversos dispositivos de feedback e um sistema de controle que faz ajustes rapidamente. Como exemplo, um jogador de beisebol se posiciona para rebater a bola e seu cérebro analisa a situação atual, o número de jogadores nas bases, o número de strikes, ou a posição da defesa. O batedor olha para o técnico da terceira base e recebe o sinal para acertar a bola (a imagem passa dos olhos até o cérebro). Conforme o arremessador atira a bola, o batedor antecipa o lançamento e contempla a direção da bola. Assim que o arremessador solta a bola, os olhos do batedor enviam informações para o cérebro, que analisa a trajetória da bola, toma decisões em frações de segundos, envia sinais para diversos músculos e coordena o movimento do taco para acertar a bola com precisão. Se o batedor errar a bola, o cérebro analisa o erro para se ajustar para a próxima rebatida. O corpo humano, assim como um sistema servo, funciona em uma dança coordenada de movimentos precisos. O sistema servo industrial moderno evoluiu de maneira significativa, e agora inclui controladores complexos com diversos dispositivos de feedback e processadores velozes que tomam decisões em nanossegundos para executar o movimento desejado. Uma divisão de um típico sistema servo industrial inclui:
O sistema servo opera de forma parecida com os processos do corpo humano – um sistema notável de movimento multieixo de centenas de músculos, diversos dispositivos de feedback e um sistema de controle que faz ajustes rapidamente. Como exemplo, um jogador de beisebol se posiciona para rebater a bola e seu cérebro analisa a situação atual, o número de jogadores nas bases, o número de strikes, ou a posição da defesa. O batedor olha para o técnico da terceira base e recebe o sinal para acertar a bola (a imagem passa dos olhos até o cérebro). Conforme o arremessador atira a bola, o batedor antecipa o lançamento e contempla a direção da bola. Assim que o arremessador solta a bola, os olhos do batedor enviam informações para o cérebro, que analisa a trajetória da bola, toma decisões em frações de segundos, envia sinais para diversos músculos e coordena o movimento do taco para acertar a bola com precisão. Se o batedor errar a bola, o cérebro analisa o erro para se ajustar para a próxima rebatida. O corpo humano, assim como um sistema servo, funciona em uma dança coordenada de movimentos precisos. O sistema servo industrial moderno evoluiu de maneira significativa, e agora inclui controladores complexos com diversos dispositivos de feedback e processadores velozes que tomam decisões em nanossegundos para executar o movimento desejado. Uma divisão de um típico sistema servo industrial inclui:
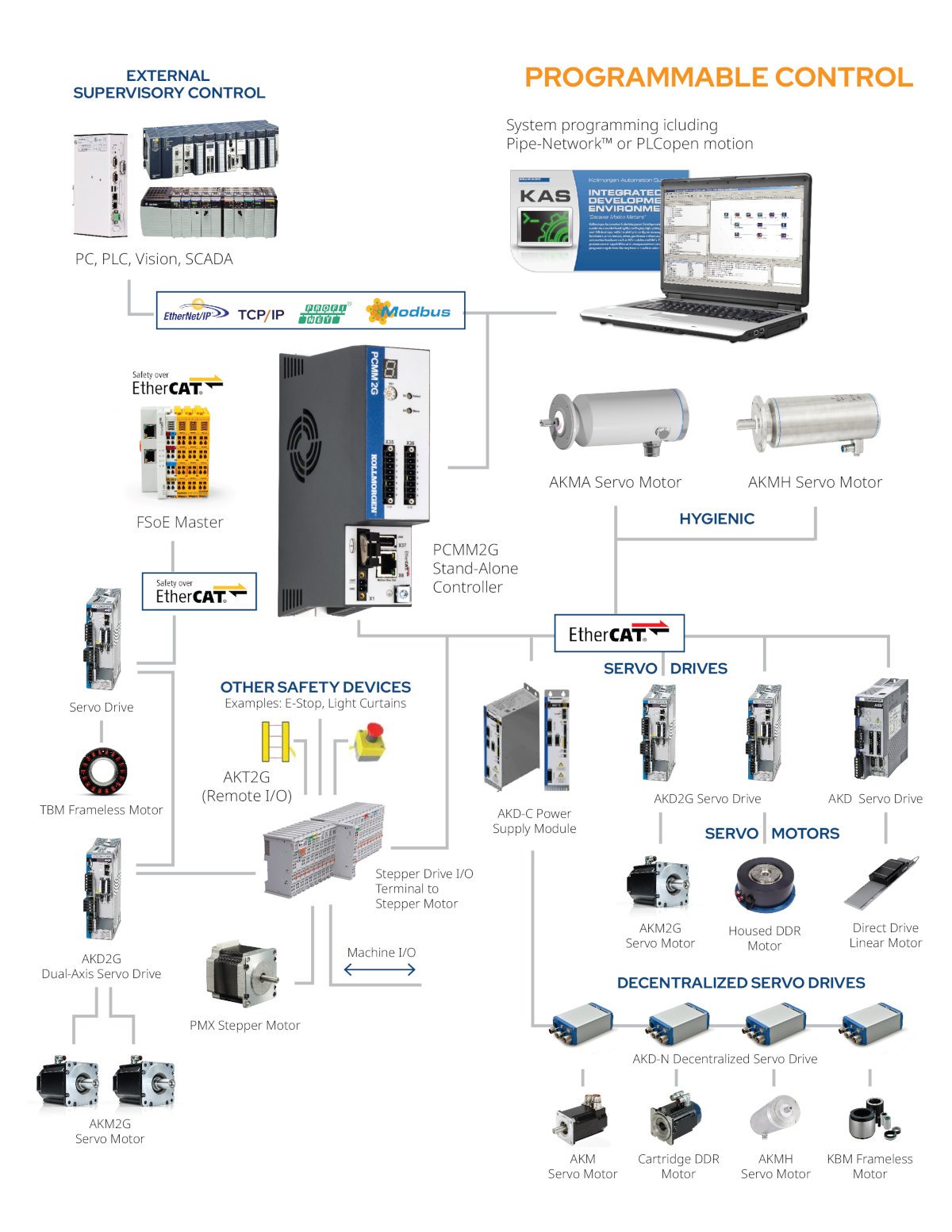
- Servomotor – os músculos do sistema, disponível em uma variedade de tecnologias, incluindo com ou sem escovas, com ou sem carcaça, além de linear ou rotativo. O motor produz o torque necessário para acelerar e mover a carga.
- Servodrive – pode ser tanto o cérebro do sistema ou parte do cérebro. Servodrives simples podem controlar o torque e/ou a velocidade, enquanto servodrives de nível superior oferecem recursos adicionais e podem ser configurados como um posicionador com capacidades de programação. Um drive ou um controlador, combinados com o servomotor, controla a tensão e a corrente que o motor recebe.
- Servocontrolador – o cérebro do sistema, que utiliza um ambiente de programação para permitir uma variedade de opções para o controle da máquina e a operação de entradas e saídas, estando interconectado com um tipo de interface gráfica de usuário. Os servocontroladores podem ser autônomos ou integrados a servodrives.
- Feedback – os sentidos do sistema são comumente integrados ao servomotor. O elemento de feedback pode consistir em um encoder, resolver, dispositivo de feedback linear, tacômetro etc. Sistemas de controle sofisticados podem incluir formas mais avançadas de feedback, como um sistema de visão.
- Cabeamento – O sistema servo é interconectado para que os cabos de feedback, comunicação e feedback de alimentação se tornem o sistema nervoso que conecta o cérebro, os músculos e os sentidos.
A seleção do conjunto ideal de componentes para um sistema servo exige uma análise cuidadosa dos requisitos de desempenho do sistema. A quantidade de "músculos" necessária determinará o tamanho do servomotor que, por sua vez, afetará a escolha do servodrive. A precisão da aplicação cumpre um papel na escolha do feedback, especificamente para o tipo e a resolução do dispositivo de feedback. A quantidade de coordenação entre outros dispositivos no sistema, juntamente com a resposta necessária, determinará o nível necessário do controlador.
Toda essa preparação pode ser uma tarefa considerável. Ao trabalhar com especialistas em controle de motion como a Kollmorgen, a escolha de um sistema servo é mais fácil e rápida, resultando em um sistema otimizado para a aplicação.








