






En vous renseignant sur les servomoteurs et les systèmes d'asservissement, vous rencontrerez probablement l'expression « système en boucle fermée ». Si vous ne vous êtes jamais demandé ce que cela signifie et comment cela fonctionne, vous êtes au bon endroit pour le découvrir. Passons en revue les questions les plus fréquentes.
Qu'est-ce qu'une boucle fermée? Les boucles sont-elles toujours fermées?
Lorsque vous observez certaines boucles familières qui nous entourent (montagnes russes, circuits de course, anneaux porte-clés), elles partagent toutes une caractéristique élémentaire : les deux extrémités se rejoignent. Le même concept s'applique aux boucles d'asservissement. Le système de commande envoie une commande au variateur. Ce dernier alimente le moteur et la réponse du moteur (vitesse et position) est communiquée au système de commande afin de boucler la boucle. L'objectif est que l'asservissement corresponde à la commande.
Mais, sur le plan technique, qu'est-ce qui ferme une boucle de servomoteur?
La réponse que les ingénieurs fournissent généralement tient en un mot : « asservissement », mais cela n'est que partiellement vrai. Les systèmes en boucle fermée reposent sur des dispositifs qui fournissent un asservissement sur le couple, la vitesse et la position, mais la boucle n'est fermée qu'après que la commande a exploité les données d'asservissement.
Par exemple, la commande du variateur exécute une commande, ou plutôt définit une cible, indiquant au variateur de basculer le moteur sur 1 500 tr/min. Le variateur alimente le moteur qui répond. Si le capteur d'asservissement indique à la commande du variateur que le moteur ne tourne qu'à 500 tr/min, cette dernière enregistre une erreur. C'est la base du système d'asservissement. Comme elle détermine que la valeur de 500 tr/min est erronée, la commande du variateur recalcule la puissance requise pour faire tourner le moteur à 1 500 tr/min et ajuste le courant en conséquence.
Que se passe-t-il dans le variateur pour fermer la boucle d'asservissement?
La boucle est fermée lorsque les données d'asservissement entrent dans une jonction de sommation dans le système de commande qui calcule une erreur (différence entre la valeur cible et la valeur réelle) et que la commande du variateur exécute une nouvelle commande pour compenser. Tout cela peut se produire très rapidement (des centaines de fois plus vite qu'un clignement d'œil) et le processus se répète continuellement.
Mais comment procéder pour réguler un autre paramètre, comme le couple ou la position par rapport à la commande de vitesse?
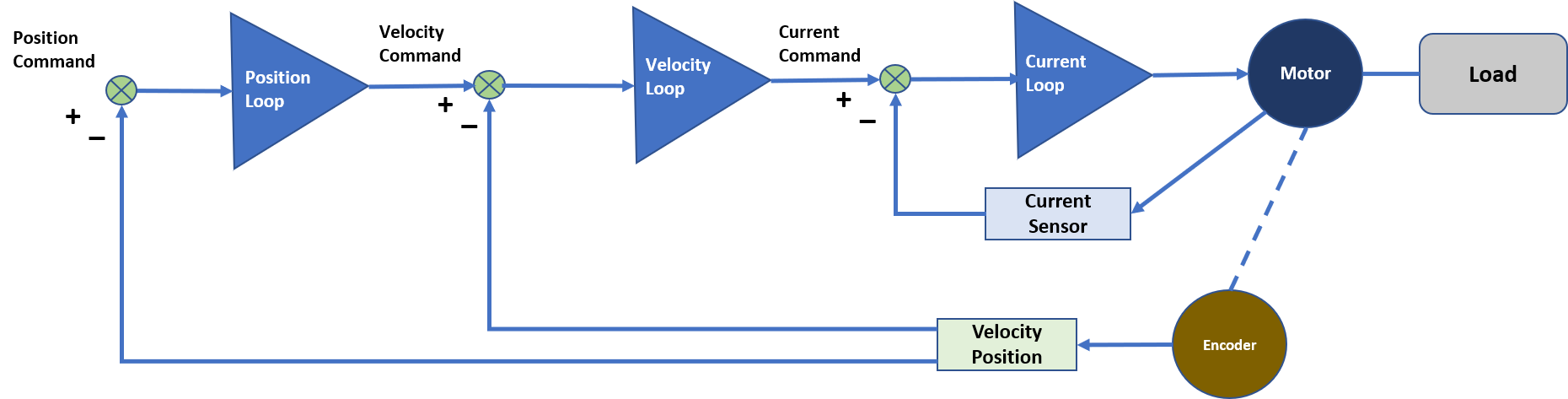
Un système d'asservissement comporte plusieurs boucles. La boucle principale correspond à la boucle de courant. Le courant est converti en couple au niveau du moteur. La boucle de courant du variateur reçoit une commande, puis alimente le moteur. Le dispositif de détection dans le variateur mesure le courant et renvoie la valeur à la jonction de sommation. En cas d'erreur, le variateur s'adapte pour corriger le courant. Mais que faire si le courant cible est erroné pour atteindre la vitesse et/ou la position cible? C'est la raison pour laquelle il existe des boucles supplémentaires.
La deuxième boucle est celle de la vitesse. L'asservissement de cette boucle est généralement lié au moteur ou à l'objet en mouvement. L'asservissement est renvoyé à la commande du variateur. En cas d'erreur de vitesse, une nouvelle commande de courant est exécutée dans la boucle de courant principale. En d'autres termes, la boucle de vitesse alimente son erreur dans la boucle de courant. Lorsque le courant change, la vitesse change également et les deux boucles examinent les données d'asservissement pour détecter les erreurs.
La troisième boucle est la boucle de position. Comme vous pouvez l'imaginer, le processus est identique. La position cible comparée à la position réelle entraîne une erreur de position qui est transmise à la boucle de vitesse sous forme de nouvelle commande. La boucle de vitesse fonctionne comme décrit ci-dessus pour fournir un courant cible. Les trois boucles fonctionnent simultanément pour atteindre la position cible.
En résumé, pour réguler la position, la vitesse, le couple ou tout autre paramètre du système comme la pression ou la tension, un asservissement doit être associé à l'une des boucles de commande pour permettre sa fermeture.
Si cela s'appelle un système en boucle fermée, existe-t-il un système en boucle ouverte?
Bien que l'expression « boucle ouverte » soit usuelle, elle est considérée comme erronée car en réalité il n'y a pas de boucle. En effet, tant que la boucle n'est pas fermée au moyen d'un asservissement, elle n'existe pas.
Dans un système en boucle ouverte, vous attendez un résultat que vous ne mesurez pas. Vous ne savez donc pas vraiment ce qui se passe côté charge. En soi, vous pouvez voir un système en boucle ouverte comme un système pas-à-pas auquel vous ajoutez un capteur d'asservissement de la position ou de la vitesse. Vous reconnaissez sur le fond l'existence de boucles potentielles que vous fermez. Le cas échéant, les capteurs d'asservissement des moteurs pas-à-pas sont souvent présentés dans leur description comme étant « de type servo ».
Si vous prenez un moteur pas-à-pas et fermez une ou plusieurs boucles, vous devez alors vous demander :
À quel moment faut-il opter pour un système d'asservissement?
Excellente question. C'est à ce moment précis que vous devez envisager de contacter un expert en mouvement pour discuter des besoins spécifiques à votre application.








