






Wenn Sie sich über Servomotoren und Servosysteme informieren, werden Sie wahrscheinlich auf den Begriff „geschlossenes Regelkreissystem“ stoßen. Wenn Sie sich jemals gefragt haben, was das bedeutet und wie es funktioniert, sind Sie hier genau richtig. Lassen Sie uns einige der am häufigsten gestellten Fragen durchgehen.
Was ist ein geschlossener Regelkreis? Sind Regelkreise nicht immer geschlossen?
Wenn Sie sich einige bekannte Kreise vorstellen, die wir um uns herum sehen – zum Beispiel Achterbahnen, Rennstrecken, Schlüsselanhänger – dann haben sie alle eine grundlegende Eigenschaft gemeinsam: Das Ende trifft wieder auf den Anfang. Das gleiche Konzept kann auch für Servoregelkreise gelten. Das Steuersystem gibt einen Befehl an den Antrieb, der Antrieb sendet Strom an den Motor und die Antwort des Motors – Geschwindigkeit und Position – wird an das Steuersystem zurückgemeldet, wodurch der Regelkreis geschlossen wird. Das Ziel ist, dass die Rückführung dem Befehl entspricht.
Aber was schließt, technisch gesehen, den Regelkreis eines Servomotors?
Die einfache Antwort, die Ingenieure oft geben, ist die „Rückführung“, aber das ist nur teilweise richtig. Systeme mit geschlossenem Regelkreis stützen sich zwar auf Geräte, die Drehmoment-, Geschwindigkeits- und Positionsrückführung liefern, aber der Regelkreis ist erst geschlossen, wenn die Steuerung etwas mit den Rückführungsdaten macht.
Zum Beispiel gibt die Antriebssteuerung einen Befehl oder vielmehr ein Ziel aus, das dem Antrieb sagt, den Motor mit 1.500 U/min zu bewegen. Der Antrieb versorgt den Motor mit Strom und der Motor reagiert darauf. Wenn das Rückführsystem der Steuerung jedoch mitteilt, dass sich der Motor nur mit 500 U/min bewegt, registriert die Antriebssteuerung einen Fehler. Hier liegt das Herzstück des Servosystems. Da die Antriebssteuerung erkennt, dass 500 U/min nicht korrekt sind, berechnet sie neu, was nötig wäre, um den Motor auf 1.500 U/min zu bringen, und passt den Strom entsprechend an.
Was passiert also im Inneren des Antriebs, um den Regelkreis der Rückführung zu schließen?
Der Regelkreis ist geschlossen, wenn die Rückführungsdaten in eine Summierstelle im Steuersystem gelangen, die einen Fehler – die Differenz zwischen Soll und Ist – berechnet, und die Antriebssteuerung einen neuen Befehl zur Kompensation ausgibt. All dies kann sehr schnell geschehen, hunderte Male schneller als ein Wimpernschlag, und der Prozess wiederholt sich ständig.
Aber was ist, wenn ich etwas anderes regulieren möchte, zum Beispiel das Drehmoment oder die Position im Vergleich zur Geschwindigkeitskontrolle?
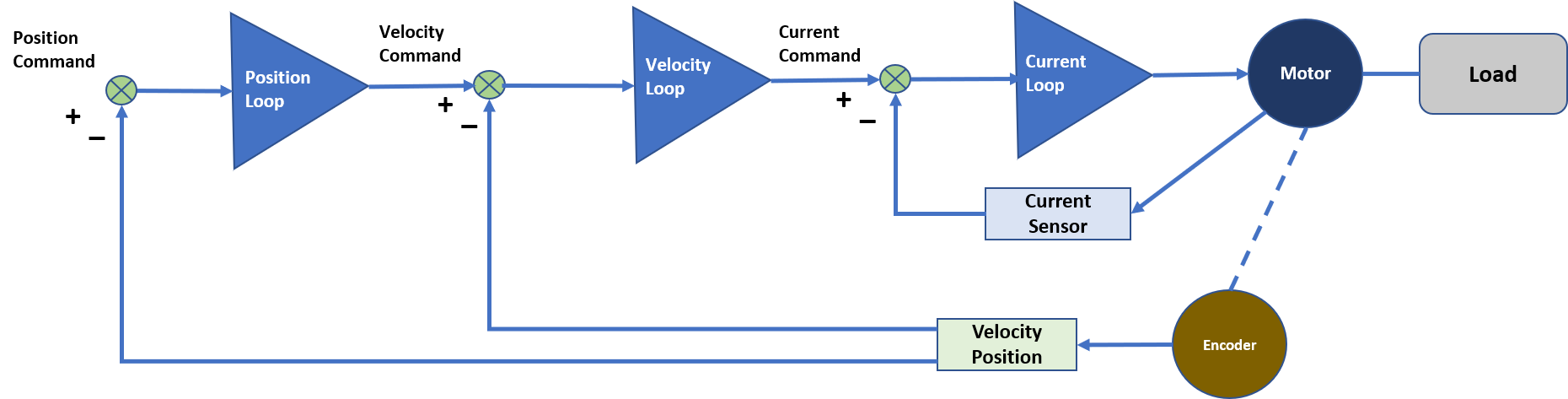
Bei einem Servosystem gibt es mehrere Regelkreise. Der primäre Regelkreis ist der aktuelle Regelkreis. Der Strom wird im Motor in Drehmoment umgesetzt. Der Stromregelkreis im Antrieb empfängt einen Befehl und sendet dann Strom an den Motor. Der Messfühler im Antrieb misst den Strom und sendet den Wert zurück an die Summierstelle. Wenn ein Fehler vorliegt, passt der Drive den Strom an, um ihn zu korrigieren. Was aber, wenn der Strom-Sollwert nicht korrekt ist, um die Zielgeschwindigkeit und/oder -position zu erreichen? Aus diesem Grund gibt es zusätzliche Regelkreise.
Der zweite Regelkreis ist der Geschwindigkeitsregelkreis. Die Rückführung für diesen Regelkreis ist in der Regel am Motor oder dem sich bewegenden Objekt angebracht. Die Rückführung wird an die Antriebssteuerung zurückgesendet. Der Unterschied besteht darin, dass die Steuerung bei einem Geschwindigkeitsfehler einen neuen Strombefehl in den primären Regelkreis ausgibt. Mit anderen Worten: Der Geschwindigkeitsregelkreis speist seinen Fehler in den Stromregelkreis ein. Wenn sich der Strom ändert, ändert sich auch die Geschwindigkeit, und beide Regelkreise überprüfen die Rückführungsdaten auf Fehler.
Der dritte Regelkreis ist der Positionsregelkreis. Wie Sie sich vorstellen können, ist der Prozess derselbe. Der Vergleich der Zielposition mit der tatsächlichen Position führt zu einem Positionsfehler, der als neuer Befehl an den Regelkreis gesendet wird. Der Geschwindigkeitsregelkreis arbeitet wie oben beschrieben, um einen Strom-Sollwert zu liefern. Die drei Regelkreise arbeiten gleichzeitig, um die Zielposition zu erreichen.
Zusammenfassend lässt sich sagen, dass zur Regelung von Position, Geschwindigkeit, Drehmoment oder eines anderen Systemparameters wie Druck oder Spannung eine entsprechende Rückführung in einen der Regelkreise erfolgen muss, damit der Kreis geschlossen werden kann.
Wenn wir dies einen geschlossenen Regelkreis nennen, kann es dann einen offenen Regelkreis geben?
Obwohl der Begriff „offener Regelkreis“ weit verbreitet ist, könnte er als falsch verstanden werden, da es eigentlich „kein Regelkreis“ bedeutet. In Wirklichkeit existiert der Regelkreis erst dann, wenn wir ihn mit einer Rückführung schließen.
In einem offenen Regelkreis haben Sie eine Erwartung an das Ergebnis, aber da Sie es nicht messen, wissen Sie nicht wirklich, was an der Last passiert. Sie können ein System mit offenem Regelkreis, wie zum Beispiel ein Schrittsystem, nehmen und eine Rückführung für Position oder Geschwindigkeit hinzufügen. Im Wesentlichen erkennen Sie, dass es potenzielle Regelkreise gibt, und Sie schließen sie. Das ist der Grund, warum Sie den Ausdruck „servoähnlich“ in der Produktbeschreibung von Rückführsystemen für Schrittmotoren finden.
Aber dann stellt sich die Frage, ob Sie einen Schrittmotor nehmen und einen oder mehrere Regelkreise schließen:
An welchem Punkt sollten Sie sich einfach für ein Servosystem entscheiden?
Gute Frage. In diesem Fall sollten Sie einen Experten für Antriebstechnik kontaktieren, um Ihre speziellen Anwendungsanforderungen zu besprechen.








