






Servo motorlar ve servo sistemler hakkında öğrenirken muhtemelen "kapalı döngü sistemleri" ifadesini görmüşsünüzdür. Ne anlama geldiğini ve nasıl çalıştığını merak ettiyseniz doğru yerdesiniz. En yaygın sorular üzerinde gidelim.
Bir kapalı döngü nedir? Döngüler her zaman kapalı değil midir?
Etrafınızdaki benzer döngüleri gözünüzün önüne getirin (hız treni, yarış pistleri, anahtarlıklar), bunların hepsi temel bir özelliği paylaşır; son noktası ilk noktasıyla birleşir. Aynı durum servo döngüleri için de geçerlidir. Kontrol sistemi, sürücüye için bir komut gönderir; sürücü motora güç beslemesi yapar; motor yanıt verir; hız ve konum bilgisi kontrol sistemine iletilir ve döngü tamamlanır. Burada amaç gelen geri beslemeye göre gönderilen komutu düzenlemektir.
Peki teknik olarak ifade edersek bir servo motor döngüsünü tamamlayan (kapatan) nedir?
Mühendislerin genelde buna verdiği iki sözcüklü yanıt "geri besleme" olacaktır, ancak bu kısmen doğrudur. Kapalı döngü sistemler tork, hız ve konum geri beslemesi sağlayan cihazlara bel bağlar. Ama döngü aslında kontrol birimi gelen geri besleme verisi ile bir şey yaptığında tamamlanır.
Örneğin sürücü kontrol birimi, sürücüye motoru 1500 rpm'de çalıştırmasını söyleyen bir komut ya da daha ziyade bir hedef gönderir. Sürücü, motora enerji verir ve motor da buna tepki gösterir. Ama geri besleme cihazı kontrol birimine motorun 500 rpm'de döndüğü bilgisini gönderirse sürücü kontrol sistemi bir hata kaydeder. Servo sistemin kalbi işte tam burasıdır. 500 rpm bilgisinin yanlış olmadığını kabul edelim. Bu durumda sürücü kontrol birimi, motoru 1500 rpm'de döndürmek için ne gerektiğine ilişkin yeni bir hesaplama yapar akımı buna göre düzenler.
Peki, sürücü içinde, geri besleme kontrol döngüsünü tamamlamak için neler oluyor?
Geri besleme verisi, hatayı (hedef ve gerçek değer arasındaki fark) hesaplayacak olan kontrol sistemi üzerindeki bir toplam bağlantı noktasına girdiğinde ve sürücü kontrolü bunu düzeltmek için yeni komut girdiğinde döngü tamamlanır. Bütün bu süreç, göz kırpma süresinden yüzlerce kat daha hızlı gerçekleştir ve tüm süreç devamlı olarak tekrarlanır.
Peki ya başka bir şey, örneğin tork veya pozisyona karşı hız kontrolünü düzenlemek istersem ne olur?
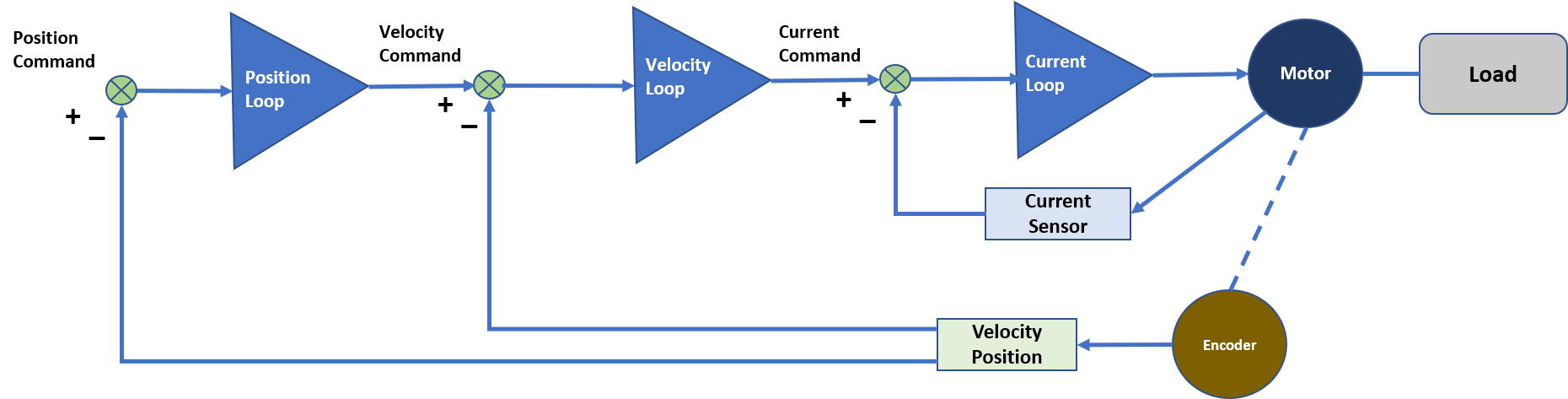
Bir servo sistem için birden çok döngü vardır. İlk döngü akım döngüsüdür. Akım, motorda torka dönüştürülür. Sürücüdeki akım döngüsü bir komut alır, ardından akımı motora gönderir. Sürücü içindeki algılama cihazı akımı ölçer ve değeri toplam bağlantı noktasında geri gönderir. Bir hata varsa sürücü akımı düzeltmek için ayarlama yapar. Peki hedef akım, hedef hızı ve/veya konumu elde etmek için doğru değerde değilse ne olur? Bu yüzden ek döngüler vardır.
İkinci döngü hız döngüsüdür. Bu döngüden gelen geri besleme tipik olarak motora ya da hareket hâlindeki nesneye bağlıdır. Geri besleme sürücü kontrolüne geri gönderilir. Bir hız hatası varsa burada fark oluşur, bu durumda kontrol, ana akım döngüsüne yeni bir akım komutu gönderir. Diğer bir deyişle hız döngüsü kendi hatasını akım döngüsüne besler. Akım değiştikçe hız da değişir ve her iki döngü, gelen geri beslemelerde hataları inceler.
Üçüncü döngü konum döngüsüdür. Tahmin edebileceğiniz üzere buradaki süreç de aynıdır. Hedef konum ve gerçek konum sonuçları karşılaştırılır, konum hatası varsa hız döngüsüne yeni bir komut gönderilir. Hız döngüsü hedef akımı vermek için yukarıda açıklanan şekilde çalışır. Üç döngü eş zamanlı çalışarak hedef konumu sağlar.
Özetlersek; konumu, hızı, torku ya da basınç ya da gerginlik gibi başka bir sistem parametresini düzenlemek için kontrol döngülerinden birine ilgili geri besleme girilmelidir, bu sayede döngü tamamlanabilir.
Bir sisteme kapalı döngü denebiliyorsa açık döngü sistemler de var mıdır?
Açık döngü terimiyle çok sık karşılaşılsa da bu yanıltıcı bir terim olarak görülebilir çünkü gerçekte "döngü yok” anlamına gelir. Bir geri besleme ile kapatılana kadar bir döngüden söz edilemez.
Bir açık döngü sistemde sonuca dair bir beklentiniz vardır, ancak bunu ölçmediğiniz için yük tarafından olan biteni bilemezsiniz. Kendiliğinden açık döngü olan bir sistemi, örneğin bir step motor sistemini alıp, konum ya da hız için bir geri besleme cihazı ekleyebilirsiniz. Temelde potansiyel bir döngü olduğu kabul eder ve bunu kapatırsınız. Bu kullanılan bir yöntemdir, bu yüzden step motorlara yönelik geri besleme cihazları görürüsünüz. Genelde bunların ürün açıklamasının bir yerinde "servo-benzeri" terimi vardır.
Bir step motor alıp bunu bir ya da daha fazla döngü ile tamamlayabiliyorsak akla şu soru geliyor:
Hangi noktada bir servo sisteme yönelmek gerekir?
İyi bir soru. İşte bu noktada, spesifik uygulama ihtiyaçlarınızı görüşmek için bir hareket çözümü uzmanı ile görüşmelisiniz.








