






Ao aprender sobre servomotores e sistemas de servo, é provável que você encontre a frase "sistema de malha fechada". Se você já se perguntou o que isso significa e como funciona, você veio ao lugar certo. Vamos analisar algumas das perguntas mais comuns.
O que é uma malha fechada? As malhas de controle não são sempre fechadas?
Quando você visualiza algumas malhas de controle familiares que vemos ao nosso redor (montanhas-russas, pistas de corrida, chaveiros) todas compartilham uma característica básica: o fim se reúne com o começo. O mesmo conceito pode ser aplicado a malhas de controle. O sistema de controle emite um comando para o drive. O drive envia potência para o motor e a velocidade de resposta e a posição do motor são comunicadas de volta ao sistema de controle, fechando a malha de controle. O objetivo é que o feedback corresponda ao comando.
Mas o que, tecnicamente falando, fecha uma malha de controle de servomotor?
A resposta de uma palavra que os engenheiros costumam dar é "feedback", mas isso é apenas parcialmente verdade. Os sistemas de malha fechada dependem de dispositivos que fornecem feedback de torque, velocidade e posição, mas a malha de controle só é fechada depois que o controle faz algo com os dados de feedback.
Por exemplo, o controle de drive emite um comando, ou melhor, um alvo, dizendo ao drive para mover o motor a 1.500 rpm. O acionamento energiza o motor e o motor responde. Mas se o dispositivo de feedback se comunicar com o controle de que o motor está se movendo apenas a 500 rpm, o controle de drive registrará um erro. Aqui está o coração do sistema de servo. Reconhecendo que 500 rpm não está correto, o controle de drive faz um novo cálculo para fazer o motor girar a 1.500 rpm e ajusta a corrente de acordo.
Então, o que está acontecendo dentro do drive para fechar a malha de controle de feedback?
A malha de controle é fechada quando os dados de feedback entram em uma junção de soma no sistema de controle que calcula um erro (a diferença entre o alvo e o real) e o controle de drive emite um novo comando para compensar. Tudo isso pode acontecer muito rapidamente, centenas de vezes mais rápido do que um piscar de olhos, e o processo se repete continuamente.
Mas e se eu quiser regular algo como torque ou controle de posição em relação à velocidade?
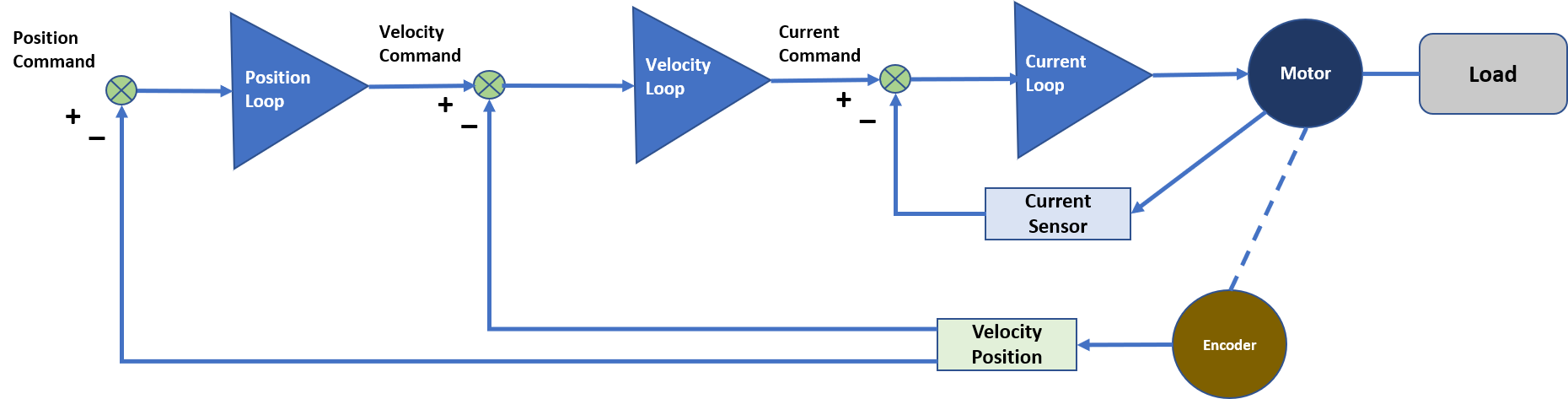
Para um sistema de servo, existem várias malhas de controle. A malha de controle primária é a malha de corrente. A corrente se converte em torque no motor. A malha de corrente no drive recebe um comando e, em seguida, envia corrente para o motor. O dispositivo de detecção dentro do drive mede a corrente e envia o valor de volta para a junção de soma. Se houver um erro, o drive será ajustado para corrigir a corrente. Mas e se a corrente alvo não estiver correta para atingir a velocidade e/ou a posição almejada? É por isso que existem malhas de controle adicionais.
A segunda malha de controle é a malha de velocidade. O feedback para esta malha é tipicamente anexada ao motor ou ao objeto em movimento. O feedback é enviado de volta para o controle de drive. A diferença aqui é que, se existir um erro de velocidade, o controle emite um novo comando de corrente na malha de corrente primária. Em outras palavras, a malha de velocidade alimenta seu erro na malha de corrente. À medida que a corrente muda, a velocidade muda e ambas as malhas de controle revisam os dados de feedback para erros.
A terceira malha de controle é a malha de posição. Como você pode imaginar, o processo é o mesmo. A posição alvo em comparação com a posição real resulta em um erro de posição que é enviado para a malha de velocidade como um novo comando. A malha de velocidade funciona como descrito acima para fornecer uma corrente alvo. As três malhas de controle trabalham simultaneamente para atingir a posição alvo.
Para resumir, a fim de regular a posição, a velocidade, o torque ou outro parâmetro do sistema como pressão ou tensão, deve haver um feedback associado em uma das malhas de controle para que a malha possa ser fechada.
Se chamarmos isso de sistema de malha fechada, pode haver um sistema de malha aberta?
Embora seja comum ver o termo malha aberta, isso pode ser considerado um equívoco, uma vez que realmente significa "sem malha". A realidade é que a malha não existe até que a fechemos com feedback.
Em um sistema de malha aberta, você tem uma expectativa do resultado, mas como você não está medindo, você realmente não sabe o que está acontecendo na carga. Você pode pegar um sistema de malha aberta inerentemente, como um sistema de motor de passo, e adicionar um dispositivo de feedback para posição ou velocidade. Essencialmente, você está reconhecendo que as malhas de controle potenciais existem, e você está fechando-as. Isso acontece, e é por isso que você verá dispositivos de feedback para motores de passo, geralmente com a frase "semelhante a servo" em algum lugar na descrição do produto.
Mas, em seguida, a questão se torna, se você está tomando um motor de passo e fechando uma ou mais malhas de controle:
Em que ponto você deve apenas ir com um sistema de servo?
Boa pergunta. É quando você deve considerar entrar em contato com um especialista em Motion para discutir sobre suas necessidades específicas de aplicações.








