Un système d'asservissement typique est constitué de trois composants principaux : un servomoteur avec un ou plusieurs dispositifs d'asservissement tels qu'un capteur à effet Hall, un codeur ou un résolveur, un variateur qui alimente et contrôle le moteur, et le câblage nécessaire entre le moteur et le variateur. Le système dans son ensemble fonctionne par l'intermédiaire d'une série de boucles de régulation intégrées.
Pendant que le variateur alimente le moteur, les capteurs d'asservissement suivent la vitesse et/ou la position du rotor. Ces signaux sont envoyés aux boucles de régulation du variateur, qui ajuste en permanence l'intensité et la tension fournies au moteur afin de corriger instantanément les éventuelles erreurs et d'assurer un déroulement sans faille des mouvements programmés.
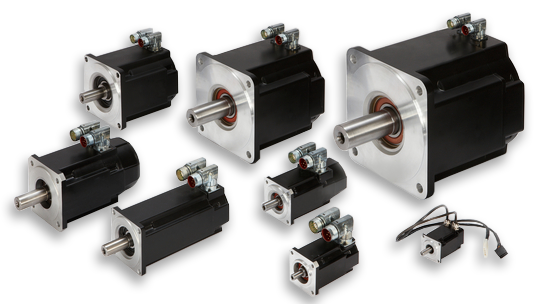
Il existe de nombreux types de servomoteurs, mais ils ont tous en commun leur capacité à intégrer des capteurs d'asservissement et à répondre précisément aux commandes de position et de vitesse provenant du variateur. Ce mouvement variable et précis est essentiel pour un large éventail d'applications industrielles : robotique, aéronautique, imagerie médicale, automatisation de laboratoire, industrie agroalimentaire, formage des métaux, etc.