Tipik bir servo sistemi üç ana bileşenden oluşur: Hall effect sensörü, kodlayıcı veya çözümleyici gibi bir veya daha fazla geri besleme cihazına sahip bir servo motor, motoru çalıştıran ve kontrol eden bir sürücü yükseltici ve motor ile sürücü arasında gerekli kablolama. Sistem bir bütün olarak bir dizi yerleşik kontrol döngüsü aracılığıyla çalışır.
Sürücü, motora güç verirken geri besleme cihazları rotorun hızını ve/veya konumunu izler. Bu sinyaller, motora sağlanan akım ve voltajı sürekli olarak ayarlayarak hataları anında düzelten ve programlanan hareketlerin kusursuz bir şekilde gerçekleştirilmesini sağlayan, sürücüde yer alan kontrol devrelerine gönderilir.
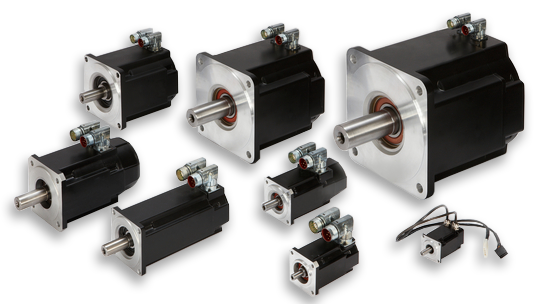
Pek çok servo motor türü vardır ancak hepsi geri besleme cihazlarıyla entegre olma ve sürücüden gelen konum, hız ve sürat komutlarına hassas bir şekilde yanıt verme özelliğine sahiptir. Bu değişken ve hassas hareket, çok çeşitli endüstriyel uygulamalarda kullanım için gereklidir: robotik, havacılık, tıbbi görüntüleme, laboratuvar otomasyonu, yiyecek ve içecek üretimi, metal şekillendirme ve çok daha fazlası.