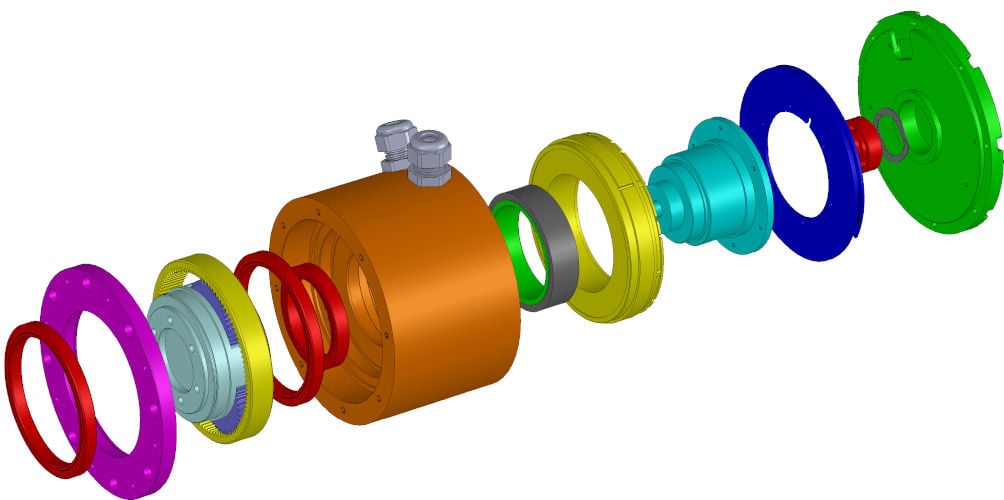
Otimização de atuadores de braço robótico para movimento articulado >
Por que o desempenho dos atuadores de braços robóticos depende de mais do que apenas da seleção do motor e como otimizar esse desempenho no nível do sistema?

AKME vs. Goldline: qual motor você deve escolher para a sua aplicação em local de risco? >
A nova Série AKME para locais de risco conta com certificações ATEX e IECEx, tamanho mais compacto do que nunca e versatilidade inédita. Compare o AKME com o EB Goldline.

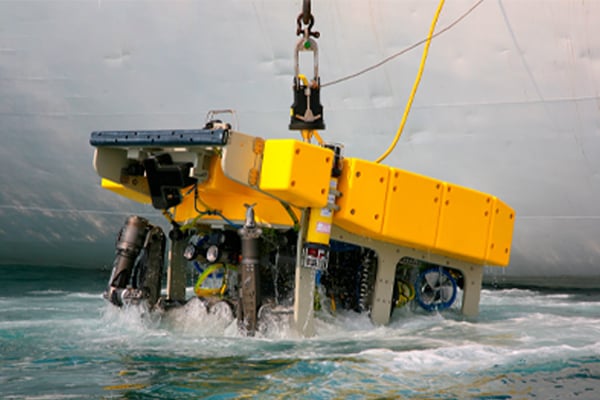
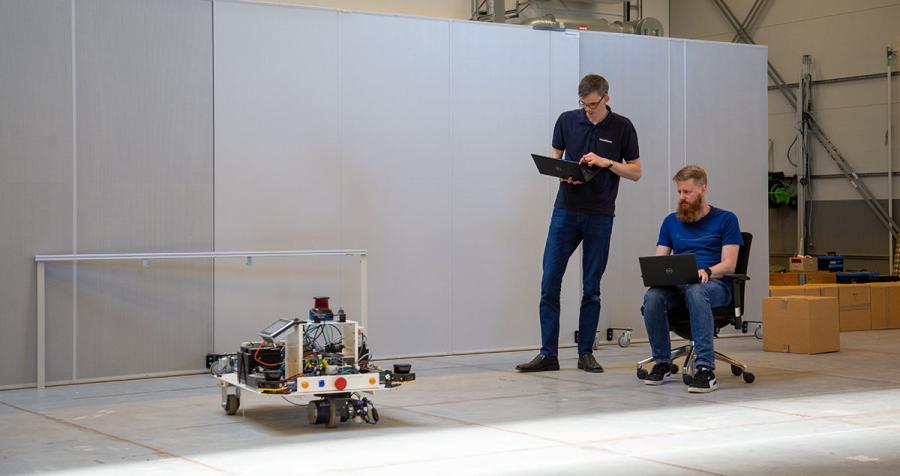
Motores sem carcaça para UGVs militares para varredura de minas: potência, tamanho e confiabilidade >
Os motores sem carcaça para veículos terrestres não tripulados (UGVs) de esteira em varredura de minas maximizam a densidade de torque, reduzem o tamanho e garantem um desempenho confiável em ambientes extremos.

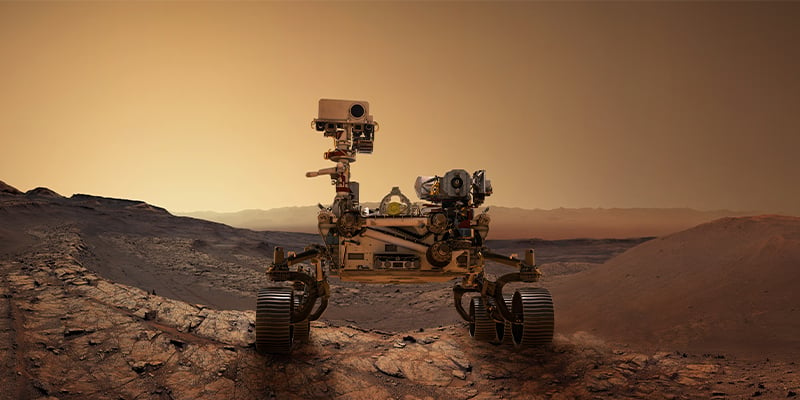
Projeto de movimento para veículos de combate blindados de última geração >
Saiba o que deve ser levado em conta ao projetar a próxima geração de veículos blindados de combate, desde arquiteturas de movimento eletromecânicas até o desempenho crítico para a missão.

Dispositivos de feedback: exploração de sensores de efeito Hall e resolvers >
Tanto os sensores de efeito Hall quanto os resolvers são escolhas populares para fornecer feedback sobre o posicionamento de servomotores. Cada um tem seus pontos fortes e limitações. Saiba como funcionam e como escolher o dispositivo de feedback…

Dispositivos de feedback: explorando encoders lineares, rotativos e senoidais >
Encoders lineares, rotativos e senoidais fornecem o feedback de posição de maior resolução para sistemas servo que exigem precisão absoluta. Mas eles não são necessariamente a melhor escolha para todas as aplicações. Saiba como os encoders funcionam…

Dispositivos de feedback: uma visão geral da localização do dispositivo, tipos de feedback e tecnologias disponíveis >
Sua escolha de dispositivo de feedback é essencial para alcançar a precisão e confiabilidade do sistema de servos. Conheça as opções de feedback e os principais critérios de seleção.

Quais são as diferenças entre os servomotores CC, BLDC e CA? >
Entenda as diferenças entre os servomotores CC, BLDC e CA. Selecionar o tipo certo para a sua aplicação é crítico para obter o desempenho, a eficiência e a longevidade ideais.
Cinco erros a evitar na especificação de um sistema de passo >
Os sistemas de passo podem ser eficientes, potentes e silenciosos — mas isso só acontece se você acertar na escolha. Neste texto, apresentamos cinco erros comuns a evitar e cinco práticas recomendadas na especificação de drives e motores de passo,…

Feedback redundante do servo: quando o posicionamento à prova de falhas é imprescindível >
Em dispositivos médicos, sistemas de defesa e várias aplicações industriais, o sistema de movimento não pode falhar em hipótese alguma. Saiba como servomotores com dispositivos de feedback redundantes integrados simplificam o desafio da garantia da…

Aeronave eVTOL: solução de desafios de movimento com a Regal Rexnord Aerospace Solutions >
Para vencer no competitivo mercado de eVTOLs, você precisa de uma fonte de soluções de movimento otimizadas na aeronave toda. Descubra por que a Regal Rexnord Aerospace Solutions é o seu parceiro ideal.