





Da manutenção e reparo de infraestrutura de águas profundas à inspeção de bacias de águas residuais De locais de petróleo e gás arriscados a canteiros de obra sujos e perigosos. Da coleta de amostras de pesquisa a buscas e resgates em áreas de desastre. Nessas e em muitas outras aplicações, os robôs de campo realizam tarefas que são muito sujas e perigosas para serem feitas por pessoas. Em uma persistente escassez de mão de obra, os robôs também são ideais para empregos para os quais simplesmente não há pessoas disponíveis.
O principal desafio dos robôs de campo é que eles precisam trabalhar em ambientes não estruturados, executar tarefas sofisticadas e muitas vezes trabalhar dia e noite, sem parar. Para realizar esses trabalhos difíceis e especializados, os fabricantes estão projetando uma ampla variedade de robôs para fins específicos.
Podem ser grandes e poderosos, como por exemplo, robôs de construção que ajudam a construir pontes e edifícios. Talvez precisem operar de forma confiável por longas distâncias em condições remotas e desafiadoras, como por exemplo, sistemas automatizados de direção e controle para caminhões de mineração autônomos de grande escala. Podem ser compactos e furtivos, como por exemplo, robôs exploradores militares. Podem ser implantados em locais extremos, como por exemplo, no fundo do oceano ou em superfícies extraterrestres. Podem realizar tarefas excepcionalmente hábeis, como por exemplo, colher frutas.
Essas aplicações especializadas exigem sistemas de movimento sofisticados, software de automação e procedimentos de manutenção que elevam a barreira de entrada tanto do ponto de vista de custo quanto de treinamento do usuário. Como resultado, há um interesse crescente em oferecer robôs como serviço, ou RaaS.
Por exemplo, as equipes de construção podem alugar um robô para realizar vários estágios da construção de pontes, que trabalham 24 horas por dia para concluir o trabalho com mais rapidez e menos riscos, ao mesmo tempo em que liberam as pessoas para trabalhar em outras tarefas essenciais. Assim que o trabalho do robô for concluído, ele poderá ser devolvido ao provedor de RaaS para ser alugado para outro local de trabalho. As taxas de utilização de robôs alugados podem ser particularmente altas, como garantia de durabilidade e confiabilidade.
Requisitos e desafios de movimento dos robôs de campo
Os robôs têm tudo a ver com movimento, e os requisitos de movimento dos robôs de campo são particularmente rigorosos. Confiabilidade, eficiência e integração eficaz são fundamentais para o desempenho de robôs que precisam trabalhar em uma série de locais imprevisíveis. Uma falha em um componente de movimento ou uma bateria descarregada enquanto o robô está em trabalho pode custar caro, demorar e ser até mesmo perigoso de resolver.
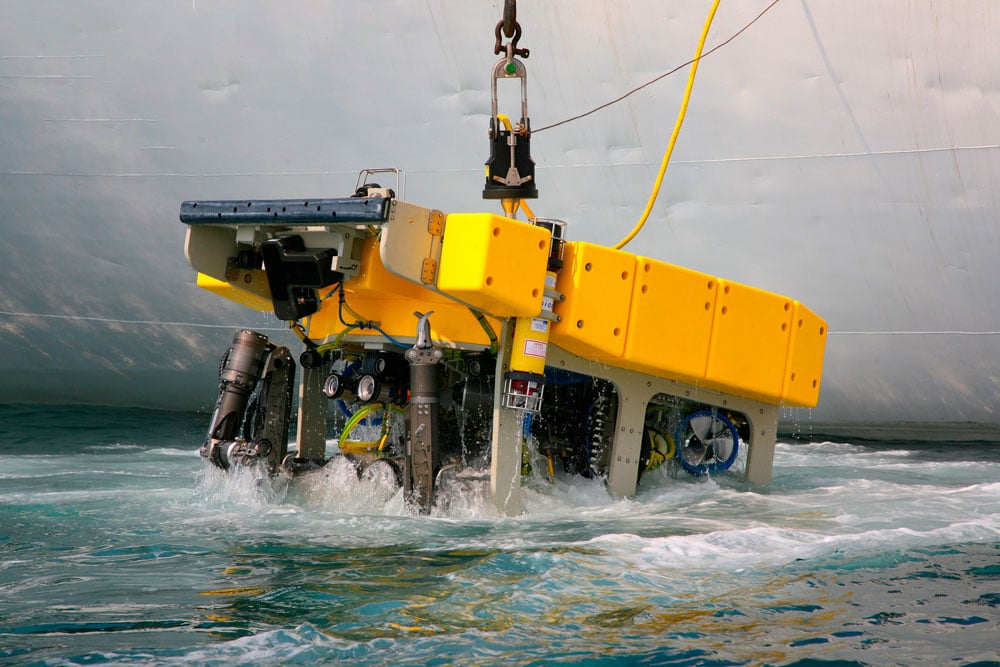
Considere, por exemplo, um robô subaquático que perde energia em um ambiente de alta pressão ou em um tanque de armazenamento de águas residuais. Ou um robô de exploração de minas que falha em uma área subterrânea profunda não considerada segura para seres humanos. Ou um veículo de exploração espacial que perde uma função crítica a mais de 160 milhões de quilômetros de distância. Em situações como essas, um robô caro torna-se inútil a menos que possa ser recuperado; e recuperá-lo pode ser extremamente difícil, perigoso ou mesmo impossível.
Pior ainda, um robô avariado pode interromper a produção, e o custo do tempo de inatividade não planeado na construção, petróleo e gás, mineração e outras indústrias pode ser astronômico.
Sistemas de movimento que sejam confiáveis na operação e eficientes no desempenho ajudam a minimizar o risco de falha, aumentam a eficiência do trabalho e maximizam o tempo que os robôs podem permanecer em operação. Os motores especificados para esses robôs devem ser:
- Devidamente integrados com outros elementos do projeto do robô, como engrenagens de ondas de tensão ou outros componentes de transmissão.
- Dimensionados corretamente, atender aos requisitos de torque contínuo e de pico da aplicação enquanto operam dentro da faixa de velocidade ideal.
- Tão compactos quanto possível, atendendo aos requisitos de desempenho da aplicação.
- Limitados quanto ao aumento térmico de forma a resistirem ao superaquecimento e fornecerem desempenho total, apesar das temperaturas ambientes mais extremas que serão encontradas.
- Construídos de forma robusta e confiável para suportar todas as condições que o robô de campo possa enfrentar.
- Projetados e construídos para atender a todos os requisitos de aplicações especializadas, como motores submersíveis para robôs subaquáticos, motores laváveis para uso em aplicações sujas e expostas às intempéries ou motores à prova de explosão devidamente certificados para locais perigosos.
- Com fornecimento confiável e com suporte em qualquer lugar do mundo, durante toda a vida útil do programa do robô.
A Kollmorgen oferece
Com décadas de experiência em projetos e fornecimento dos motores de mais alto desempenho do setor, otimizados para juntas de braços e outras aplicações robóticas, a Kollmorgen sabe como atender aos exigentes requisitos dos robôs de campo onde falhar não é uma opção.
Algumas das características mais críticas são as altas contagens de polos, enrolamentos projetados para minimizar perdas no núcleo e laminações que minimizam o atrito estático e o amortecimento viscoso. E tudo isso permitindo que os motores operem de forma mais eficiente por um tempo de funcionamento mais longo e com menor aumento térmico para maior confiabilidade do sistema.
Os motores sem carcaça projetados para juntas robóticas oferecem um grande furo passante e alta relação DI/DE para reduzir o peso, o comprimento e a inércia geral da junta, ao mesmo tempo que acomodam facilmente cabos de alimentação/feedback e outros componentes. Muitos motores sem carcaça são projetados para combinar com projetos de engrenagens harmônicas (ondas de tensão) disponíveis no mercado para um projeto de robô mais econômico e confiável.
A Kollmorgen também pode modificar os enrolamentos do motor de maneira econômica para atender às necessidades exatas de velocidade, torque contínuo e torque máximo de cada aplicação. Em vez de correr risco com um motor super ou subdimensionado, que degrada a eficiência e a confiabilidade do sistema, os motores Kollmorgen oferecem o desempenho preciso que cada aplicação exige, no pacote mais eficiente em termos de peso, espaço e energia.
A Kollmorgen também fornece motores projetados para uso em águas profundas, locais perigosos, expostos às intempéries, laváveis, alta altitude, extraterrestres e outros ambientes extremos. Com uma variedade tão grande de aplicações altamente especializadas, é comum que os OEMs solicitem prototipagem rápida e façam um baixo volume de pedidos iniciais enquanto trabalham para oferecer projetos de novos robôs de campo ao mercado. Embora a maioria dos fornecedores de movimento recuse essas solicitações, a Kollmorgen acolhe com satisfação os projetos especializados.
A cultura colaborativa da Kollmorgen, a variedade de opções de produtos, as capacidades de engenharia incomparáveis e as equipes de projeto locais ajudam a reduzir os ciclos de projeto e oferecer ao mercado um robô de campo mais capaz, confiável e de maior duração. E com instalações globais de fabricação e suporte, compromisso com a qualidade consistente e décadas de experiência comprovada em robótica, a Kollmorgen ajuda a garantir o sucesso a longo prazo do seu robô de campo.
Saiba mais
Veja como resolvemos os desafios mais difíceis do projeto de motores robóticos em nossa sessão de treinamento online Aprimore a eficiência dos robôs por meio do projeto e da seleção do motor. E leia nosso Catálogo de motores sem carcaça TBM2G para saber sobre as vantagens de um motor projetado especificamente para robôs. A seguir, entre em contato conosco para uma conversa de engenheiro para engenheiro sobre os requisitos exclusivos do seu projeto.








