





 Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >Networks Supported by KAS, PCMMs, and PDMMs
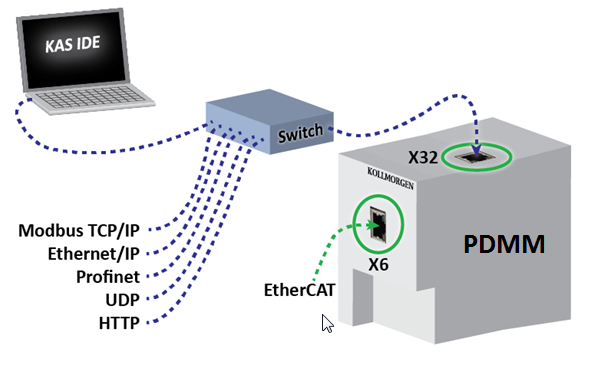
The following chart outlines the networks (field buses) supported by the PCMM and PDMM and the key parameters of each.
| Non-Motion Networks | Motion Networks | |||||
|---|---|---|---|---|---|---|
| Category | Modbus TCP/IP | UDP | HTTP | Profinet | EtherNet/IP | EtherCAT |
| Transmission Speed | 100 Mbits/sec | |||||
| Deterministic? | No | Yes | ||||
| Hardware Layer | Ethernet Technology | |||||
| Update Rate | 20 to 1000 msec | down to 1 msec | 100 to 200 msec | down to 8 msec | down to 10 msec | 0.25 to 2.5 msec |
| Support in IDE | Dedicated setup screen for mapping dictionary variables to Modbus transmission address. | Set of FBs to setup communications and send data in non-string or string format. | Setting on Controller Properties in Project view for making all parameters accessible to HTTP link. Can use standard HTTP commands to start and stop a project, and for reading/writing variable values. | Dedicated setup screen for mapping dictionary variables to transmission locations. | Dedicated setup screen for mapping dictionary variables to transmission locations. | FBs for reading/writing parameters to Drives and third-party I/O: DriveParamRead, DriveParamWrite, ECATReadSDO, ECATWriteSDO. Automatic network setup through scan feature. Screens to setup init and PDO variables. Tools to integrate third-party products. |
| Types Supported | Slave Only | Send or Receive | Server Only | Profinet IO RT Controller, Profinet IO RT Device | Scanner, Adapter, Tag Client | CoE (CAN Application Protocol Over EtherCAT) Master |
| Documentation Available | Yes | Yes | Yes, includes examples using C# and C++ programming languages | Yes | Yes | Yes |
| Sample Project Available? | Yes, on KDN | Yes | Yes, on KDN | No | Yes, on KDN | N/A |
| Transfer Motion? | Non-Motion Profile only | Yes | ||||
| Use with PC-based embedded Controller (Developed in VB, VS, etc, and in C#, C++, etc.) | Typically not | Yes | Yes | Typically not | Typically not | No, PDMM is master only |
| PDMM Connection point | Connector X32 | Connector X6 | ||||
| IDE Requires Node Config File | No | Yes | ||||
| Typical Mating Products | Common for third-party HMI interfaces | PC-based Controller | PC-based Controller | Typically used with Siemens PLC | - | Kollmorgen Drives, Kollmorgen I/O, third-party products |
For more detail see the attached document.

Comments
my devices includes three AKD pdmm and one PCMM.Now, I want to know if i can design a software on PC base on c# or labview to control the PCMM or AKD PDMM. I have find the AKD datasheet ,so can i use the cable from akd X6 into my computer and use my software to control the motor without the PCMM and KAS software? how to setup the connect between PC and AKD PDMM?
thanks for your answer.
Other options to connect the PC based C# or Labview software to the AKD-PDMM or PCMM would be HTTP, Modbus TCP/IP , or UDP. There is information on these in KDN and in the online KAS manual: Welcome to KAS!.website
If you provide more information on the " curves which are changed with time' , I can let you know if the KAS software could meet the performance need. Send to my email address: [email protected].
As an alternative, if you write your own motion SW and place it on an ECAT master then you can communicate directly with the 3 AKD drives. The ECAT master could then replace the PxMM KAS controller.
Normally for my applications I use many WAGO PLC with MODBUS protocol in a network tree.
To improve performance I use UDP MODBUS connection instead of TCP MODBUS connection.
Is possible make UDP MODBUS connection even with PCMM?
How many simultaneous MODBUS connection are permetted with PCMM?
I found the hanswer for AKD but not for PCMM.
Thanks in advance.
The PxMM controller, which can only be a Modbus TCP/IP Slave, can communicate with multiple Modbus TCP/IP Masters. The number of Master would depend on the other application needs. Each master will take a slice of CPU power. How many would you like to connect to one PxMM?
It's the first time I use this device and I don't know its strengths and weaknesses, at the moment the program is only in my head.
At the moment I defined 4 communication channel
- Data pump from an old serial scale (may be I will use an RS232 to EtherCAT gateway)
- PcMM management from the master PanelPC
- I/O sharing with a secondary PanelPC
- I/O sharing with an external PLC WAGO
In any case, the use of the MODBUS protocol is not mandatory even if it is very convenient for me. In the case I will implement UDP communications