






When learning about servo motors and servo systems, you’re likely to encounter the phrase “closed-loop system.” If you’ve ever wondered what that means and how it works, you’ve come to the right place. Let’s step through some of the most common questions.
What is a closed loop? Aren’t loops always closed?
When you visualize some familiar loops we see around us—roller coasters, racetracks, key rings—they all share a basic characteristic: The end meets back up with the beginning. The same concept can apply to servo loops. The control system issues a command to the drive; the drive sends power to the motor; and the motor’s response—speed and position—are communicated back to the control system, closing the loop. The goal is for the feedback to match the command.
But what, technically speaking, closes a servo motor loop?
The one-word answer engineers often give is “feedback,” but this is only partially true. Closed-loop systems do rely on devices that provide torque, speed and position feedback, but the loop is only closed after the control does something with the feedback data.
For example, the drive control issues a command, or rather a target, telling the drive to move the motor at 1,500 rpm. The drive energizes the motor, and the motor responds. But if the feedback device communicates to the control that the motor is only moving at 500 rpm, the drive control registers an error. Here lies the heart of the servo system. Recognizing that 500 rpm is not correct, the drive control makes a new calculation for what it would take to get the motor to spin 1,500 rpm and adjusts the current accordingly.
So, what’s happening inside the drive to close the feedback control loop?
The loop is closed as feedback data enters a summing junction in the control system that calculates an error—the difference between the target and the actual—and the drive control issues a new command to compensate. All of this can happen very quickly, hundreds of times faster than the blink of an eye, and the process repeats continuously.
But what if I want to regulate something else, like torque or position versus velocity control?
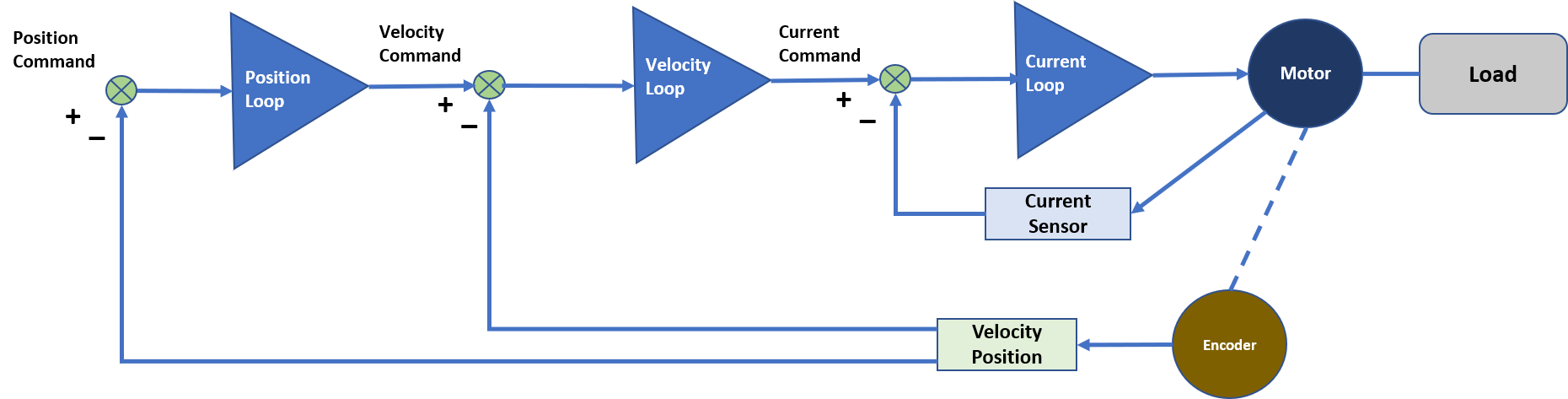
For a servo system there are multiple loops. The primary loop is the current loop. Current translates to torque at the motor. The current loop in the drive receives a command, then sends current to the motor. The sensing device inside the drive measures the current and sends the value back into the summing junction. If an error exists, the drive adjusts to correct the current. But what if the target current is not correct to achieve the target velocity and/or position? This is why there are additional loops.
The second loop is the velocity loop. The feedback for this loop is typically attached to the motor or the object in motion. The feedback is sent back to the drive control. The difference here is that if a velocity error exists, the control issues a new current command into the primary current loop. In other words, the velocity loop feeds its error into the current loop. As the current changes, velocity changes, and both loops review the feedback data for errors.
The third loop is the position loop. As you can imagine, the process is the same. Target position compared to actual position results in a position error that gets sent to the velocity loop as a new command. The velocity loop works as described above to provide a target current. The three loops work simultaneously to achieve the target position.
To summarize, in order to regulate position, velocity, torque or another system parameter like pressure or tension, there must be associated feedback into one of the control loops so that the loop can be closed.
If we call this a closed-loop system, can there be an open-loop system?
Although it’s common to see the term open-loop, this could be considered a misnomer since it really means “no loop.” The reality is the loop doesn’t exist until we close it with feedback.
In an open-loop system you have an expectation of the outcome, but since you are not measuring it you really don’t know what is happening at the load. You could take an inherently open-loop system, like a stepper system, and add a feedback device for position or velocity. Essentially, you’re recognizing that potential loops exist, and you’re closing them. This does happen, and it’s why you’ll see feedback devices for steppers—usually with the phrase “servo-like” somewhere in the product description.
But then the question becomes, if you’re taking a stepper motor and closing one or more loops:
At what point should you just go with a servo system?
Good question. That’s when you should consider contacting a motion expert to discuss your specific application needs.






")

