





 Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >Stepper Slice IO module EL-7031 in a KAS ECAT Network
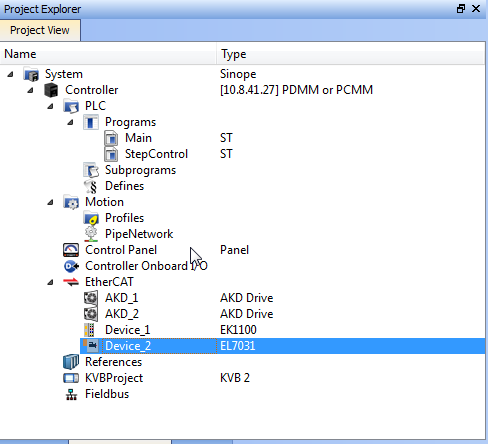
The attached KAS Project integrates a Beckhoff EL-7031 Stepper module into a KAS Ethercat network.
Product
| KAS Controller | AKD-M00306-MCEC-0000 |
|---|---|
| Stepper (slice) Module | EL 7031 |
| EtherCAT coupler | EK-1100 |
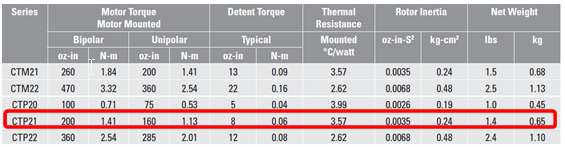
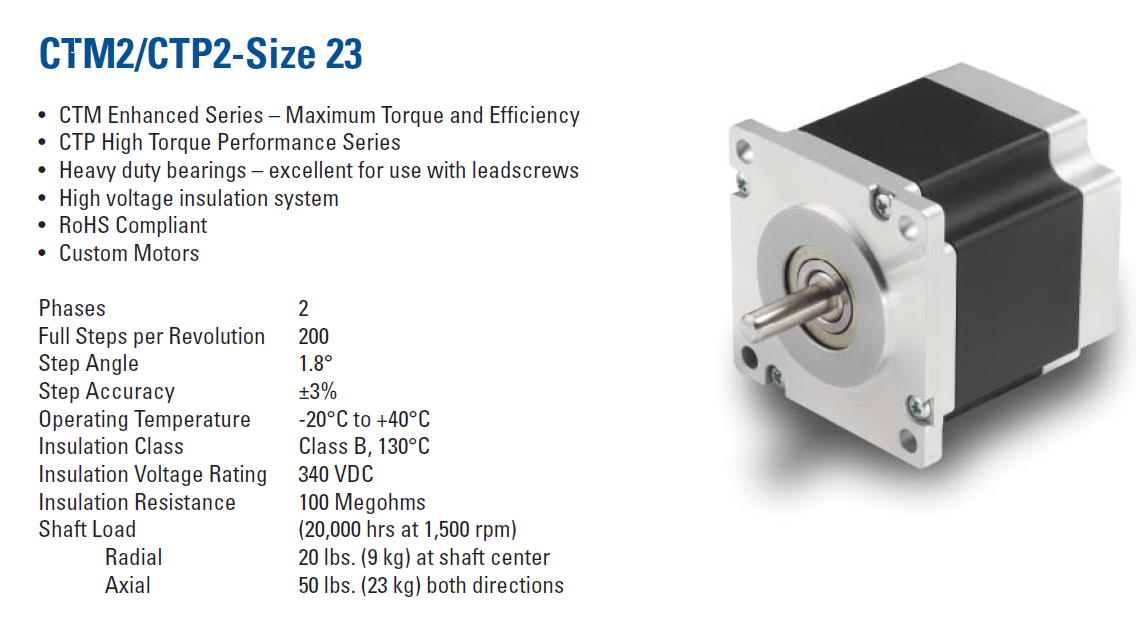
| Motor | CTP21NLF15NAA00 |
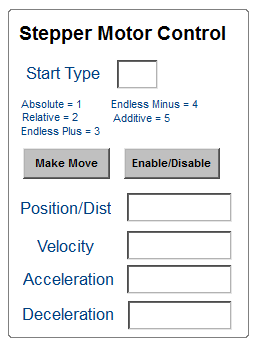
Control Panel
The following KAS Control Panel was created inside the KAS project to operate the Stepper Motor:
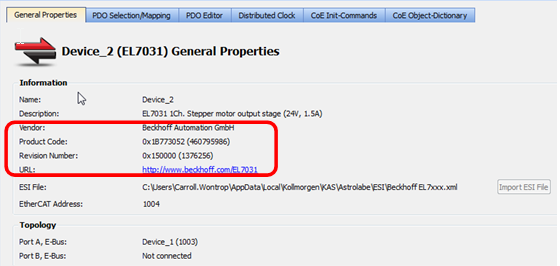
Ethercat Setup
The following EL7031 ESI file was loaded into the project:
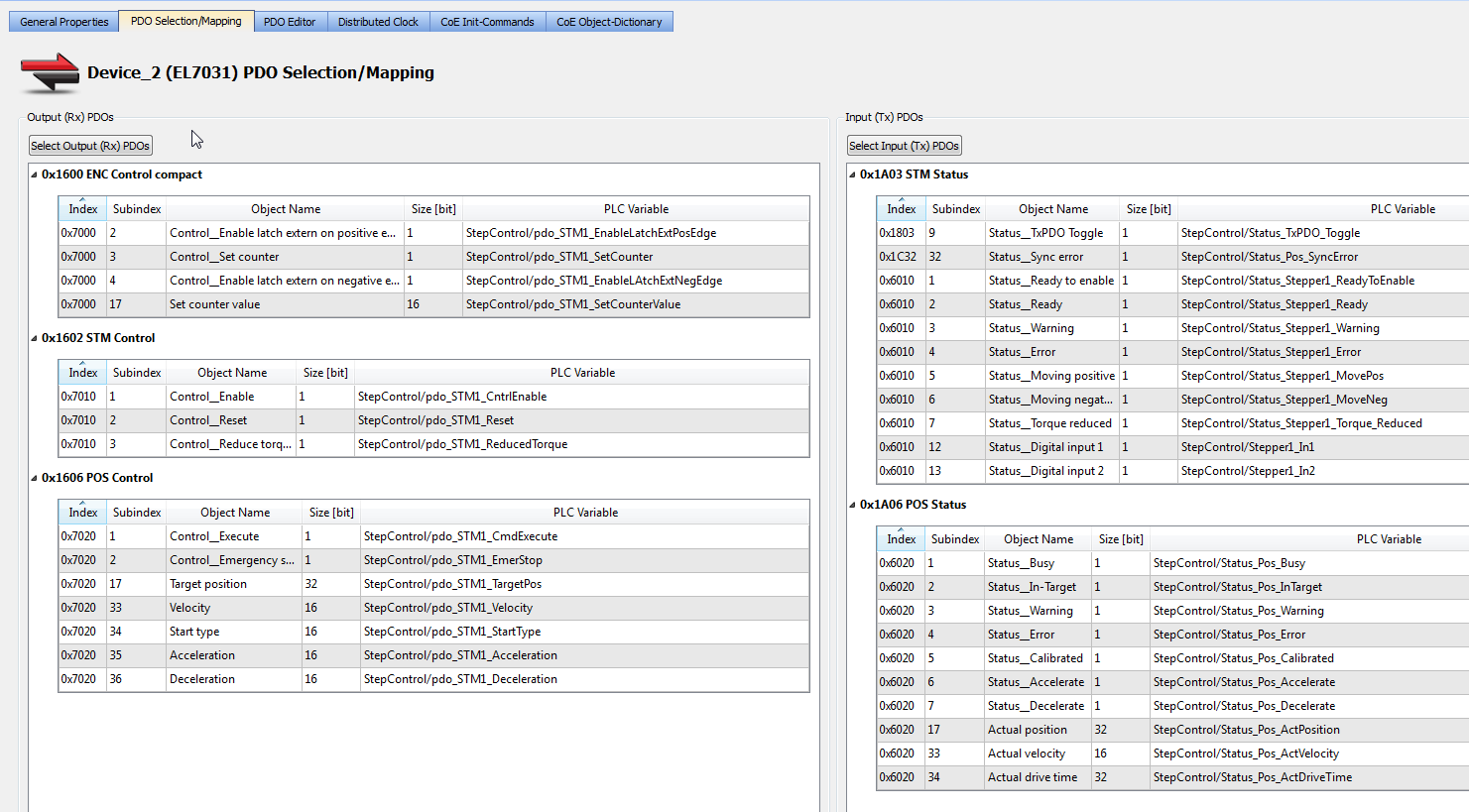
The EL7031 ESI file contains the list of standard PDOs. The following was chosen for the project and objects in the PDO were directly mapped to project Dictionary parameters:

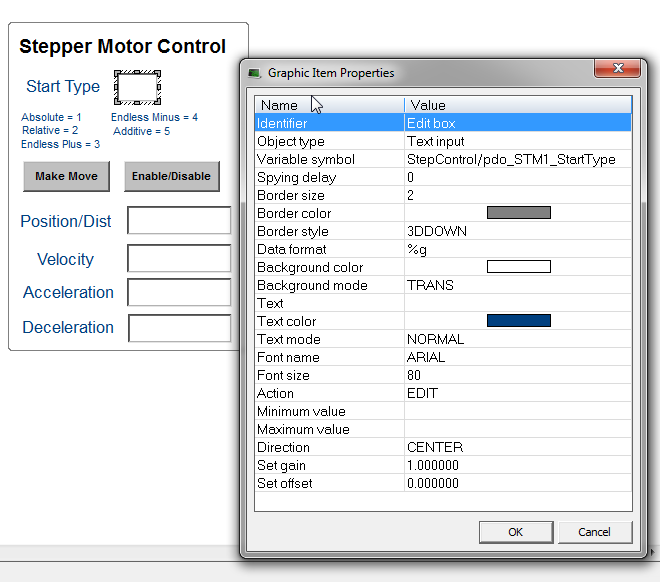
The Dictionary parameters are linked to the Control Panel in the project:
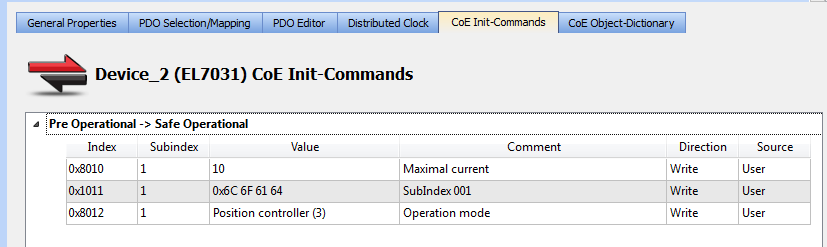
To initialize the stepper module the following objects: restore to manual default settings and set opmode for positioning were written to the stepper module when the ECAT network comes up:

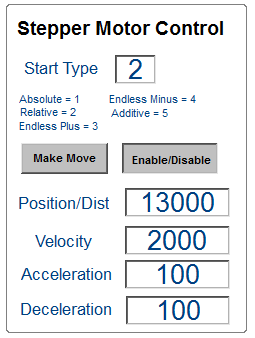
Example Operation
Here is the Control Panel setup to run a relative position move:
Motor Specifications
Connections (Motor to EL 7031)
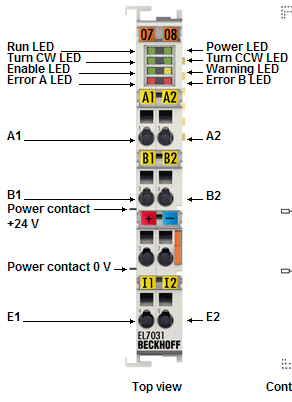
A1 – Black Motor Wire
A2 – Orange Motor Wire
B1 – Red Motor Wire
B2 – Yellow Motor Wire
Back to top