Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >AKD2G Gantry Mode with KAS Controller
AKD2G Dual Axis drives have the ability to use the new Gantry Command Source. When the Command Source is changed to 4 - Gantry, Axis2 will follow all commands sent to Axis1 (enable/disable and motion commands). This is meant to be used when there are gantry mechanics and both Axis1 and Axis2 are physically connected and sharing a load. By giving them the same motion commands at the same time ensures that they will not fight each other while connected and prevent binding of the mechanics. There is also a new Gantry Following Error parameter that calculates the difference between Axis1 and Axis2 actual positions to raise a fault if they become out of sync with one another. This mode is described in more detail on a separate KDN page at AKD2G Gantry Application Setup. This article focuses on using Gantry Mode in a KAS application with a PDMM or PCMM EtherCAT Master controller. There is a new KAS template program attached that can help enable the Gantry mode from the controller but also turn it off if you need to send separate commands to each axis in order to home or readjust an axis. Below is also an embedded video going over how to use the template program and how it differs from our standard templates built into the KAS IDE software.
Main difference with Template control panel is enabling of Axis1 and Axis2 are now separted as you may want to only have one axis enabled at a time especially during a home routine. With gantry mechanics connecting both axis together, if they are both enabled and gantry mode is not enabled they might fight each other and cause drive faults and mechanical binding.
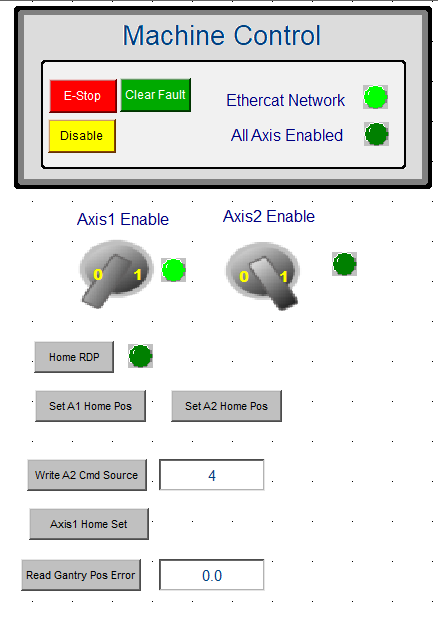
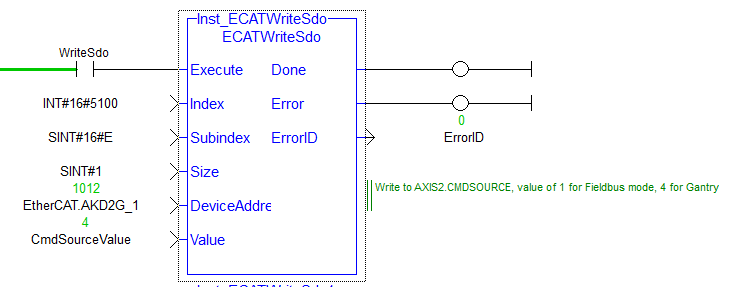
Also, there are new programs titled "Gantry" and "RDPHoming". RDPHoming is a custom home routine for a specific set of test hardware. It would need to be modified in order to be used with any other machine, but was left as an example of using the ECATWriteSdo function blocks to change drive op modes in the middle of a homem routine. The Gantry ladder program contrains a number of ECATWriteSdo and ECATReadSdo function blocks that can access AKD2G parameters. They are tied to new buttons on the control panel in order to change the command source of Axis2 between Fieldbus and Gantry modes. They also allow you to do an "Axis1.Home.Set" command to clear Axis1 and Axis2 position while Gantry mode is enabled at the AKD2G drive level (not in the KAS Controller) in case there are faults related to the GANTRY.PL.ERR which is the difference between Axis1 and Axis2 actual positions. MC_SetPos function block will not affect the axis position at the drive level and will not effect GANTRY.PL.ERR. There is also an ECATReadSdo command to monitor the value of GANTRY.PL.ERR from the control panel.