





 Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >Feed Forward
Valid for S300, S700
The parameter FFTSW (Feed Forward Switch) changes the settings for different applications.
Velocity feed forward
The actual velocity feed forward is added to the position loop output in front of the velocity loop.
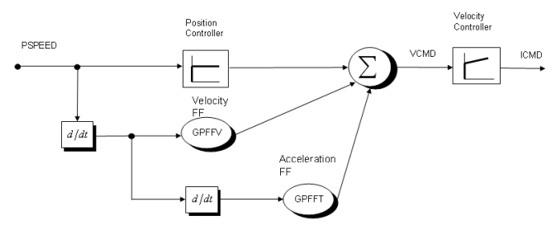
Speed feed forward
- valid for all position loop modes (OPMODE=4...8)
- calculated from the trajectory speed value
- calculation: Feed Forward = PSPEED • GPFFV
PSPEED: internal speed command value in Counts/250 µs calculated out of the set point generation (motion task or interpolation of external trajectory).
GPFFV: speed feed forward factor (normalized to 1)
Acceleration feed forward
- valid for all position loop modes (OPMODE=4...8) except for the table motion task
- calculated from the trajectory acceleration value
- calculation: Feed Forward = ACMD • GPFFT
ACMD: acceleration set point in Counts / (250µs • 250µs); ACMD = Delta(PSPEED)
GPFFT: current feed forward factor (normalized to 1)
Current feed forward
The actual current feed forward is added to the velocity loop output in front of the velocity loop filter (BiQuad and secondary low pass filter) with the following current loop.
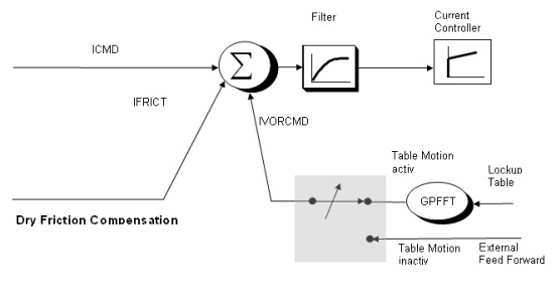
Lookup table current feed forward
- valid only for table motion tasks (OPMODE=4,8)
- take over from the motion profile table
- calculation: IVORCMD = normalization factor • table entry for feed forward
Normalization factor: {(MJ • GPFFT) / (MKT • DIPEAK)} • {Delta(S) / (ACCTIME2)}
| MJ | motor inertia |
| GPFFT | current feed forward factor |
| MKT | torque constant of the motor |
| DIPEAK | max. drive peak current |
| Delta(S) | acceleration distance for a table motion task |
| ACCTIME | acceleration time for a table motion task |
External current feed forward
- current feed forward IVORCMD can be given by the field bus or by the analog interface
- valid for all velocity and position modes (OPMODE=0,1,4..8)
- normalisation: IVORCMD=3280 for DIPEAK (drive peak current)
Inertia feed forward
- valid only for SERCOS external position set point (OPMODE=6)
- calculation: IVORCMD = Delta(PSPEED) • GPFFT
Friction compensation
The current implementation only compensates for the Coulomb friction. The friction-compensation-current ISTFR (unit in Ampere) is proportional to the Coulomb torque / force. If the actual velocity is within the interval of {-VSTFR, +VSTFR}, the friction compensation current is proportional to the velocity in order to avoid jerky movement at small velocities. If the actual velocity is outside the interval of {-VSTFR, +VSTFR, then a constant current ISTFR will be added.
- valid for all velocity and position modes (OPMODE=0,1,4..8)
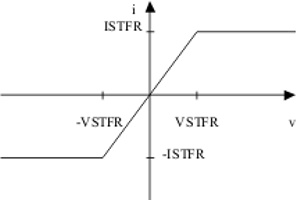 |
Characteristic curve of the friction-compensation feed-forward current |
Back to top
