





 Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >Shunt Power Calculations for Incremental Motion Applications
This document refers to G&L PiC application note AN000019 and describes shunt power calculations for incremental motion applications. Applies to all G&L Centurion drives (DSM100, DS100, DS200, and AS100) and motors (SSM, FSM, and HSM).
Purpose
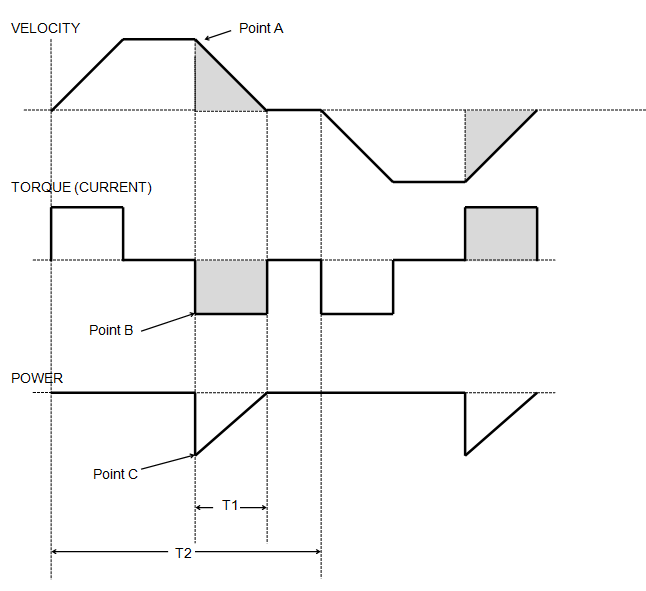
A typical incremental motion profile is shown in figure 1. During the shaded portions power is returned from the motor to the drive module. The drive module handles the excessive regenerated power by dissipating it in a shunt power resistor. The drive shunt circuit is capable of a peak power and a continuous average power. This note describes how the peak and average shunt power can be estimated for the typical incremental motion profiles as in figure 1. Refer to the specific drive manual to determine the applicable maximum peak and average shunt power ratings. Refer to the spreadsheet at the end of this document for drive bus capacitance, shunt turn-on and shunt power.
Peak Shunt Power

Where: Speed = Motor speed in RPM for point A as obtained from SYSTEX.
Torque = Torque in lb-in for point B as obtained from SYSTEX.
Refer to figure 1 for point A and B definitions.
Average Shunt Power

Where: Peak Shunt Power is calculated above.
T1 = Time to decelerate.
T2 = Total cycle time as defined in Figure 1.
Note: Consult factory for assistance if T1 > 2 Seconds, or for more complex or non-repetitive motion profiles.
Figure 1 - Typical Incremental Motion Profile
DC Bus Capacitance
Note: If you are using the Systex, the peak and continuous generating power data has already been calculated and can be used in the equations below. Systex also provides speed and torque data. All motor data specs (KT and winding resistance) can be found in the Product Guide.
I2R losses = continuous current2 x motor winding resistance
I = continuous current (Amps) = continuous torque (for point D in figure above) ¸ KT
R = motor winding resistance (W)
Continuous Shunt Power (Watts) = continuous generating power -
I2R losses- bus capacitance absorption
bus capacitance absorption = C/2 (Vf2 - Vi2)
C = bus capacitance of the drive
Vi = initial bus voltage (VDC)
240 VAC input Þ initial bus voltage = 240 x 1.414 = 325 VDC
115 VAC input Þ initial bus voltage = 115 x 1.414 = 160 VDC
Vf = voltage level that shunt turns on (VDC)
Example
Using Systex, the system solution is a DSM130 drive powered with 115 VAC and a
HSM460 motor. The application deceleration torque is 110 lb-in, the maximum speed is 1800 rpm and the continuous torque is 50 lb-in. The time to decelerate (t1) is 0.75 seconds and the cycle time (t2) is 2.8 seconds. HSM460 KT = 4.4 lb-in/A and winding resistance = 0.69 Ohms.
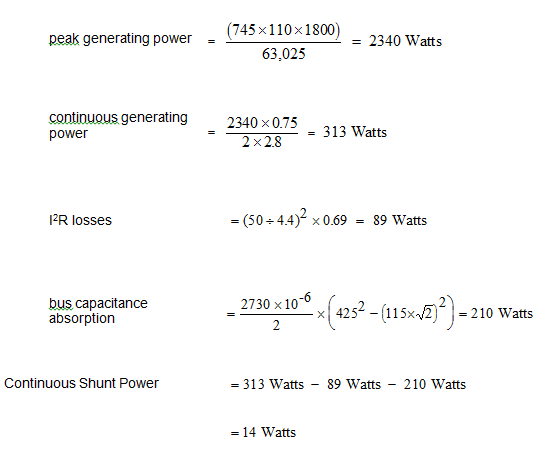
DSM130 continuous shunt power = 50 Watts
Application continuous shunt power = 14 Watts
Drive continuous shunt power > Application continuous shunt power
DSM130 peak shunt power = 4500 Watts
Application peak shunt power = 2340Watts
Drive peak shunt power > Application peak shunt power
=> Drive can dissipate application shunt power, therefore no external shunt is required.
Table of Drive Shunt and Capacitance Values
|
Bus Capacitance (microFarads) |
Shunt turn-on voltage (VDC) |
Internal peak shunt power (watts) |
Internal cont. shunt power (watts) |
External peak shunt power (watts) |
External cont. shunt power (watts) |
|
|---|---|---|---|---|---|---|
| DS110/DSM110 | 1170 | 425 | 4.5K | 50 | 6K | 300 |
| DS120/DSM120 | 1950 | 425 | 4.5K | 50 | 6K | 300 |
| DS130/DSM130 | 2730 | 425 | 4.5K | 50 | 6K | 300 |
| DS175/DSM175 | 4290 | 425 | 10.0K | 50 | ||
| MicroDSM007 | 1410 | 400 | 0 | 0 | ||
| MicroDSM015 | 1880 | 400 | 0 | 0 | ||
| MicroDSM030 | 1880 | 400 | 0 | 0 | ||
| AS110 | 3000 | 210 | 1K | 30 | 6K | 200 |
| AS120 | 3000 | 210 | 1K | 30 | 6K | 200 |
| AS130 | 3000 | 210 | 1K | 30 | 6K | 200 |