Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >Blank KAS Starter Templates (PLCopen and Pipenetwork)
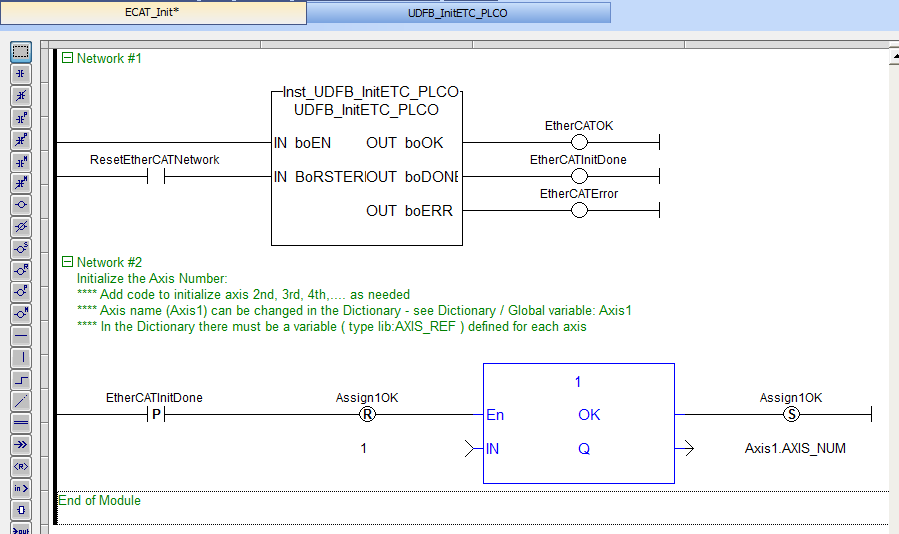
The attached KAS projects are blank templates for users that want to start completely from scratch. They do not have sample code, control panels, and KVB projects that other template programs built into the KAS IDE software have. They only contain calls to subprograms that are available at this KDN page (https://www.kollmorgen.com/en-us/developer-network/initialize-ethercat-communication-and-motion-engine/) and will call initialization code to build any cam profiles, PLCopen axis, and Pipenetwork blocks setup in the Project Explorer of the KAS IDE software. These subprograms also have the ability to restart the EtherCAT network if there were communication issues or controller errors that caused the master to stop communicating with EtherCAT slave devices.
Users can add new programs to add their own code, or even delete the EtherCAT Initialization projects if they want to call these subprograms themselves. Since these templates are blank, all supporting function blocks including how to enable/disable a servo axis or adding Axis_Ref data type variables in the Dictionary to assign a PLCopen axis number to (shown in screenshot below), or filling in Pipeblocks in the Pipenetwork editor will have to be done by a programmer.