Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >Acceleration profile tables
Valid for S300, S700
The acceleration/braking ramps can be adjusted with a customer profile stored previously in the servo amplifier. You can create your own profile tables (see page Setup of acceleration profile tables).
Default tables in the servo amplifier
An excessive peak current may be necessary depending on the selected acceleration profile. The following description defines the required higher value referred to the trapezoidal profile.
Legend:
IPx= Ipeak factor x: profile requires x% more peak current of the servo amplifier
I2tx= I2t factor y: profile requires y% more peak charge of the servo amplifier
|
Trapezoidal |
The drive is given a constant linear acceleration/deceleration to the target speed. |
|
sin² |
To limit any jolting, the drive is accelerated/decelerated within the acceleration time along an acceleration ramp without any disruptions. The resulting speed characteristic corresponds to a sine² curve. The profile is stored in a table in the servo amplifier. |
Profile tables
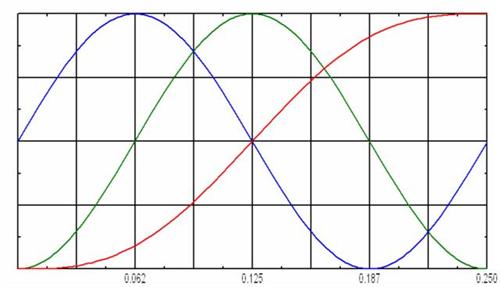
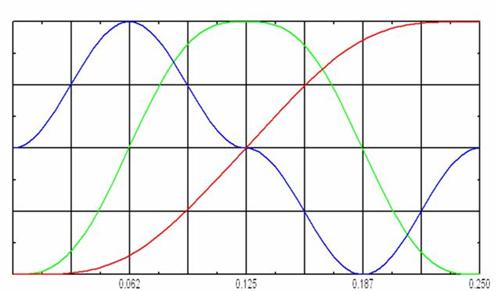
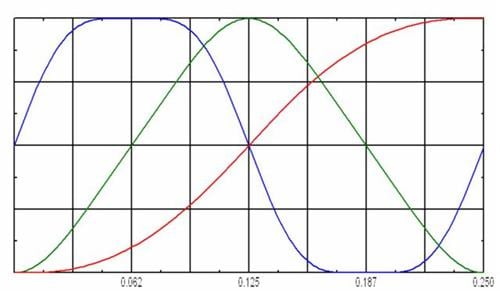
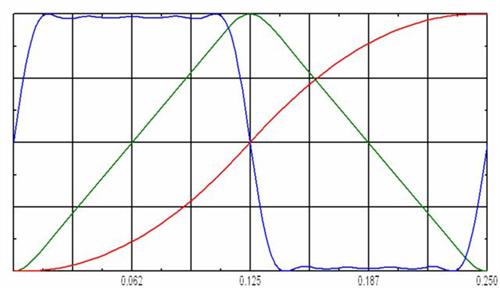
red : P_cmd (position set point)
green : v_cmd (velocity set point)
blue : I_cmd (torque set point)
|
0 |
IPx 157% |
|
|
1 |
IPx 200% |
|
|
2 |
IPx 132% |
|
|
3 |
IPx 113% |
|
|
4...15 |
unused |
Customer specific tables with totally 4000 points possible (see page Setup of acceleration profile tables). |