





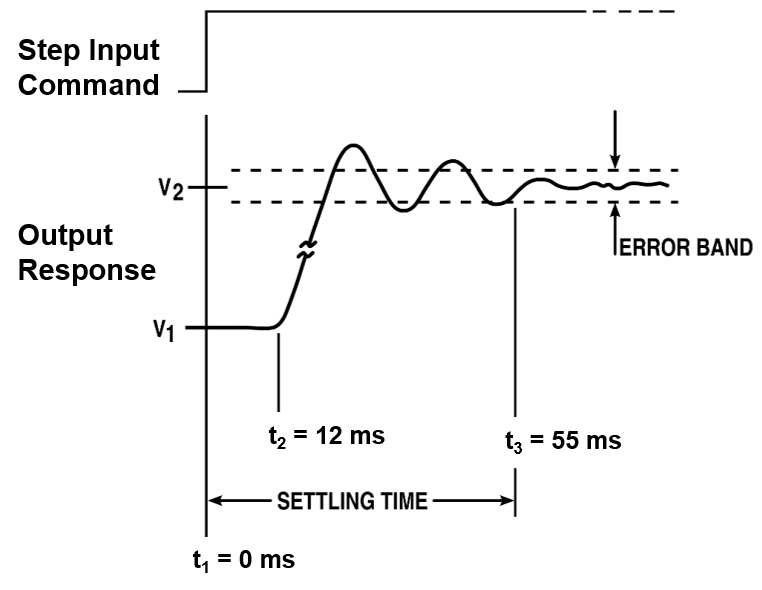
 In simplified terms, it can be calculated as 1/(settling time) of a given step response of a servo system. Using the time domain to measure the step response of a servo motor accelerating to a commanded speed, the settling time will be the point at which the motor speed has settled within the allowable error band of the commanded speed. In the diagram, the time to settle within the error band is measured as 55ms, with a calculated bandwidth of 18Hz. When a motion command is received, high bandwidth is key to a fast servo system response. Machines that need fast move and settle times, require higher bandwidths.
In simplified terms, it can be calculated as 1/(settling time) of a given step response of a servo system. Using the time domain to measure the step response of a servo motor accelerating to a commanded speed, the settling time will be the point at which the motor speed has settled within the allowable error band of the commanded speed. In the diagram, the time to settle within the error band is measured as 55ms, with a calculated bandwidth of 18Hz. When a motion command is received, high bandwidth is key to a fast servo system response. Machines that need fast move and settle times, require higher bandwidths.
Bandwidth is affected by several factors including mechanism stiffness, system inertia, and available torque or force. Mechanisms with multiple couplings, belts and pullies, or geared systems introduce compliant elements that reduce machine stiffness. Even machine frame or base structures play a role in system stiffness, which in turn affects bandwidth.