





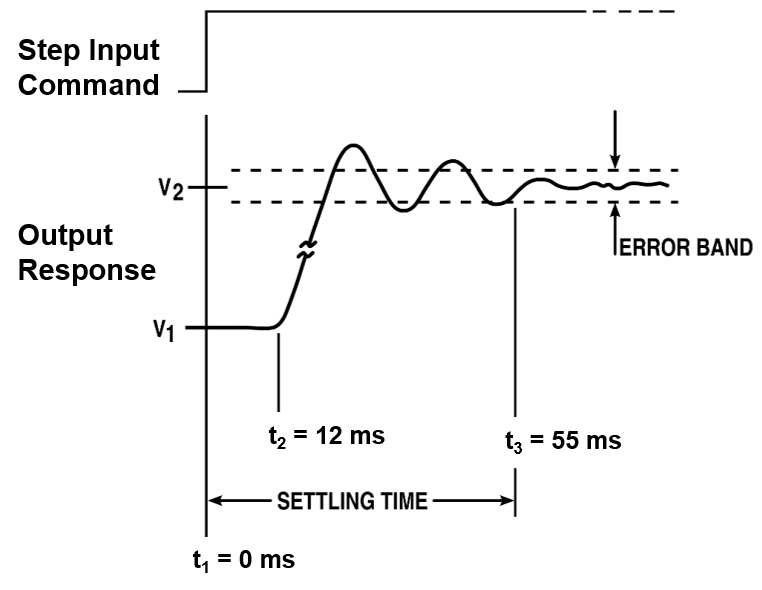
 Em termos simples, ela pode ser calculada como 1/(tempo de resolução) de uma determinada resposta de etapa de um sistema de servo. Usando o domínio do tempo para medir a resposta de etapa de um servomotor acelerando a uma velocidade comandada, o tempo de resolução será o ponto em que a velocidade do motor se estabeleceu dentro da banda de erro permitida da velocidade comandada. No diagrama, o tempo de estabilização dentro da banda de erro é medido como 55 ms, com uma frequência de acomodação calculada de 18 Hz. Quando um comando de movimento é recebido, a alta frequência de acomodação é a chave para uma resposta rápida do sistema de servo. Máquinas que precisam de movimentos rápidos e tempos de estabilização exigem frequências de acomodação mais altas.
Em termos simples, ela pode ser calculada como 1/(tempo de resolução) de uma determinada resposta de etapa de um sistema de servo. Usando o domínio do tempo para medir a resposta de etapa de um servomotor acelerando a uma velocidade comandada, o tempo de resolução será o ponto em que a velocidade do motor se estabeleceu dentro da banda de erro permitida da velocidade comandada. No diagrama, o tempo de estabilização dentro da banda de erro é medido como 55 ms, com uma frequência de acomodação calculada de 18 Hz. Quando um comando de movimento é recebido, a alta frequência de acomodação é a chave para uma resposta rápida do sistema de servo. Máquinas que precisam de movimentos rápidos e tempos de estabilização exigem frequências de acomodação mais altas.
A frequência de acomodação é afetada por vários fatores, incluindo rigidez do mecanismo, inércia do sistema e torque ou força disponível. Mecanismos com múltiplos acoplamentos, correias e polias ou sistemas com engrenagens introduzem elementos compatíveis que reduzem a rigidez da máquina. A estrutura da máquina ou as estruturas de base desempenham um papel na rigidez do sistema, o que, por sua vez, afeta a frequência de acomodação.
Mais sobre este tópico
O que é margem de ganho de amplitude?
Quatro valores-chave para determinar a estabilidade do sistema de servo