





 Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >Using EOT (End of Travel) hardware limit switches in a KAS application
The PDMM consist of a control card and a drive card. The controller card contains the application program and the drive card contains the servo loops. The KAS IDE (Integrated development Environment) contains an Online Configuration Mode for setting up the drive parameters in the PDMM (version M1EC and MCEC) and in standalone AKD drives (version NAEC) used in a multi-axis KAS system. In the Online configuration in the digital Input setup page there is the option to set hardware EOT switches that are connected to drive inputs on connectors X7 or X8. If setup, when the switch is triggered motion is brought to a stop by the drive card. In a KAS application where the profile generator is in the control card motion commands to the drive card will continue until the motion generator is stopped.
Stopping the motion generator can be done by one or more of the following:
- Monitor the EOT switches in the application program and when triggered call another function block to stop the generator (from presently executing FB)
- Use the drive EOT switches outside of another set of switches that are monitored in the application program. The drives EOT switches then become a second tier that should never be activated in normal operation
- Replace the inside switches in 2 with software EOT switches that monitor positon in the application program and respond accordingly when the position is reached
One situation during development that can occur when drive EOT switches is set up is that motion created in the application program will drive motion to the switch and motion will stop, the user will then command motion in the opposite direction but no motion will result. In this situation the reason for no motion in the opposite direction could be that because the KAS profile generator continued to command motion to the drive side even though the EOT setup prevented any actual further motion there was a following error build up that needs to be eliminated before actual motion would occur. One way to help this would be to lower max following error in the On Configuration Limits screen but that may not always be possible.
An example of this is an EOT switch located at Position 1000 and a motor at position 500 is given a MC_MoveVelocity FB call in the positive direction. When the actual position reaches 1000, motion will stop but the profile generator will continue to proceed on. If the Profile generator is at position 3000 and motion is commended in the opposite direction, the profile generator will start to count down from 3000 but motion in the opposite direction will not start until the profile generator transitions below 500.
In the AKD drive, Hardware EOT limit switches are setup in the Workbench Digital Inputs and Outputs screen. Example below is DIN3 and DIN4 are used for Positive and Negative Limit Switches:
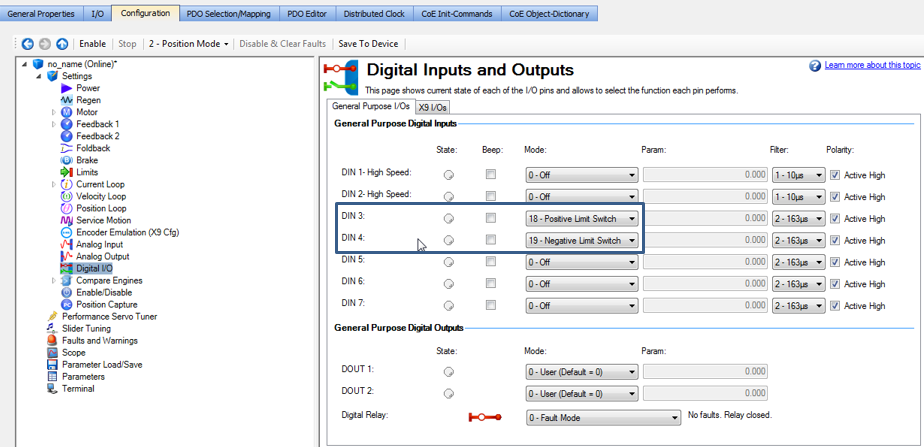
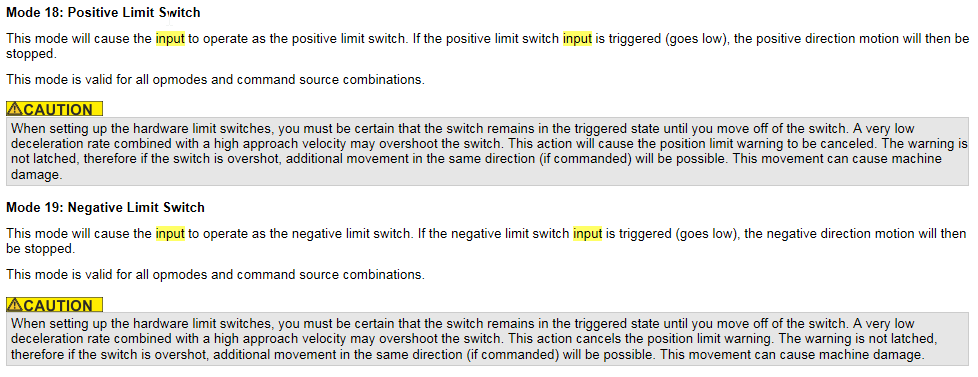
Note: once one of both of the inputs are set, the input must have voltage applied to it or the n107 or n108 warning will occur. Here is more detail from the manual:
For more information on using software EOT position limits in a KAS PxMM application:
https://www.kollmorgen.com/en-us/developer-network/software-position-limits-pxmm-application/
