Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >BiSS
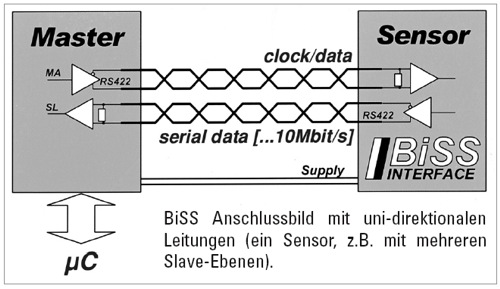
The bidirectional digital sensor interface (BiSS) safeguards the communication between position encoder and servo amplifier and can transfer measurements of up to 8 sensors simultaneously.
For 1 to 8 participants the interface master delivers the timing signal for the simultaneous recording of all position data as well as for the synchronous serial data transmission. Only four unidirectional RS422 data lines are required; minimal slave electronics finds place directly in the sensor IC.
If the master sends a clock on MA line, the slave answers on return line SL with the recorded position data. Commands or parameters can be communicated by a PWM time form, but this is not requied for the BISS protocol.
Protocol
The BiSS protocol classifies every participant in different data areas: Sensor data and register data. These data areas are interpreted differently with regard to the accessibility and assignment performance to cover a variety of sensor applications.
A bidirectional parameter communication to the equipment configuration, if necessary also for so-called OEM parameters, is usually placed in the register data area. Fast variable angle data are placed in the sensor data area. Controller cycle times faster than 10 µs also for data words up to 64 bits are no problem.
Sufficient space for redundancy is available and usually is used for a CRC implementation (Cyclic Redundancy cheque). To reach the best possible data rate, sensor data are framed only by a start and a stop bit.