Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >AKD Observer Basics
How does an observer work?
The observer will create an estimate of system velocity that is derived from the measured Velocity Feedback and the integral of the Current command. The velocity estimate is frequency-dependent. At frequencies below the observer bandwidth the estimate is determined by the measured feedback and at frequencies above the observer bandwidth, it will be determined by the integral of the current command and will be a combination of the 2 at the observer bandwidth.
The plant of a given system is mathematically modeled. The observer plant model is usually much simpler than the actual system, purely linear and does not include external disturbances such as cogging due to magnetic poles, motor slots, and friction. In the case of the AKD’s Luenberger Observer, the model is a simple model in the form of a first-order velocity mode plant, it assumes a servo amplifier in torque mode under ideal conditions which includes current loop bandwidth much higher than mechanical bandwidth requirements. The plant model would be ![]() however, the AKD’s observer implements VL.K0 as an external gain outside the observer control loop
however, the AKD’s observer implements VL.K0 as an external gain outside the observer control loop ![]() . The observer plant is therefore
. The observer plant is therefore ![]()
Observer Block Diagram

The observer is actually a multi-input, single-output closed-loop system that closes a pid loop around the plant model.
AKD Plant Velocity (Work Bench Description)
| Plant output | Rad/sec |
| Plant Input | Amps |

Acceleration Feedforward
| Output | Amps |
| Input | radsec2 |
![]()
AKD Acceleration Feed Forward
![]()
Observer Gain
![]()
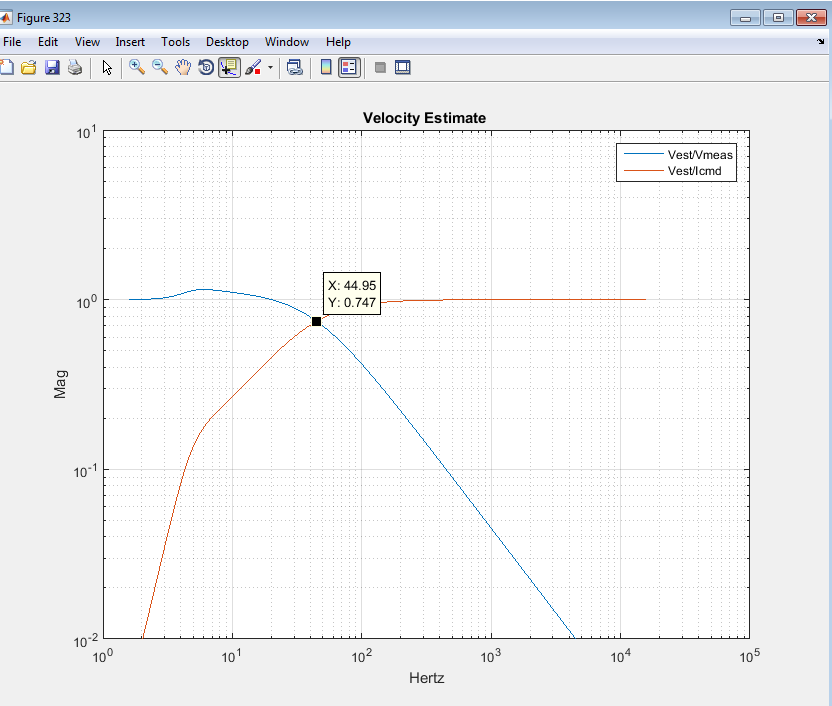
Frequency Responses for Vest/Vmeas and Vest/Icmd
VL.OBSBW=45 Hz
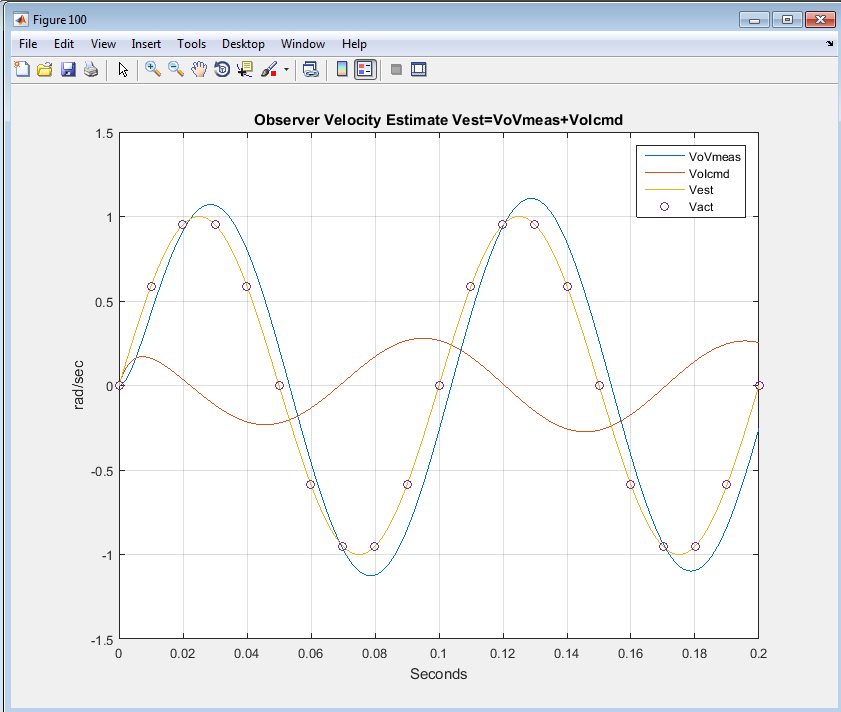
Numerical Example
For the velocity estimate to be accurate it requires both the Velocity estimate from the feedback device and the Velocity estimate derived by integrating the current command. In this example the Observer Plant model is identical the Physical Plant. The Actual Velocity is a 10 Hz sine wave.