O motor de passo é parte de um mecanismo completo que produz o torque e a velocidade necessários (ponto de carga necessário) para fornecer movimento a uma carga – para movê-la, posicioná-la, levantá-la, inspecioná-la etc. Existem vários requisitos de desempenho que devem ser considerados ao selecionar um motor de passo para uma aplicação. Em geral, a solução do motor escolhida deve produzir os requisitos necessários de torque de carga, velocidade e perfil de movimento, caber no espaço disponível (espaço físico) e funcionar conforme necessário com a tensão disponível.
A maneira mais rápida e confiável de determinar essas necessidades é com uma ferramenta de dimensionamento do motor - Stepper Optimizer. Essas ferramentas calculam os pontos de carga do motor e analisam o perfil de carga e de movimento para gerar uma lista de possíveis opções no banco de dados do motor de passo. Ao determinar a curva de desempenho do motor de passo, o perfil de temperatura (uma saída da ferramenta de dimensionamento) e a tensão de operação do motor, a melhor opção do motor de passo pode ser encontrada.

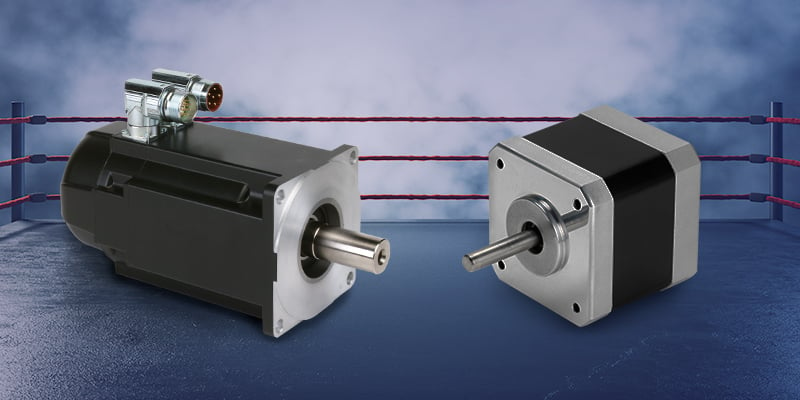
Os motores de passo estão disponíveis em uma variedade de tecnologias que podem afetar as decisões de seleção. Dois estilos de motor de passo predominantes são o de lata e o híbrido. Os motores de passo de lata são uma solução de menor custo, cobrem a extremidade inferior da faixa de torque de retenção e têm ângulos de passo que variam de 0,9 a 18 graus. Já os motores de passo híbridos cobrem uma ampla gama de opções de torque de retenção, são usados em aplicações de maior precisão e estão disponíveis com uma variedade de ângulos de passo (1,8 graus é a mais comum). Os enrolamentos estão disponíveis nas configurações unipolar e bipolar.
É necessária uma avaliação cuidadosa da carga e dos requisitos de tensão do motor disponíveis para selecionar a solução adequada de motor de passo.