





 Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >AKD2G Low Voltage DC Operation
Overview
This section has additional considerations for DC power supplies.
A single power supply can be used to provide the main power for the DC input. This document provides guidance for the operation of AKD2G Sxx-6V drive with low voltage DC supply and should be used in conjunction with AKD2G-Sxx Installation Manual. The voltage range of supply is less than 90VDC. See the Regulatory Information section of the AKD2G Installation Guide for more details on isolation and grounding requirements.
NOTE: AKD2G is not currently UL listed for DC low voltage operation (less than 300V). UL listing for DC low voltage operation is planned. For high voltage DC operation, see section 8.6.1 in the AKD2G-Sxx Installation Manual.
Single Power Supply Operation. DC bus lines X3/7-8
Activate DC supply (VBUS.DCOPERATION = 1) and set VBUS.DCNOMINAL. These can be set through the WorkBench Power screen.
Wire the single supply + terminal to X3-7 (+DC) and – terminal to X3-8 (-DC). Make sure PE terminal is connected to system ground. The power supply outputs must be isolated from the power line. DC power supply can also be connected to mains lines R/T (L1/L3). Refer to AKD2GSxx-Installation Manual.
The maximum continuous and peak (3 sec) main power and current at 75 V bus for the AKD2GMV 3A and 6 A single drives are shown in the table below. This table provides nominal ratings assuming the motor back EMF is at half the input DC voltage for continuous rating.
| 3/9 ARMS | 6/18 ARMS | 12/30 ARMS | |
|---|---|---|---|
| Main (continuous) | 175 W at 75 V | 350 W at 75 V | 700 W at 75 V |
| 2.5 ADC | 5 ADC | 10 ADC | |
| Main Peak (3 sec) | 750 W at 75 V | 1,500 W at 75 V | 3000 W at 75 V |
| 10 ADC | 20 ADC | 40 ADC |
Fig 1 and Fig 2 provide representative connection diagrams.
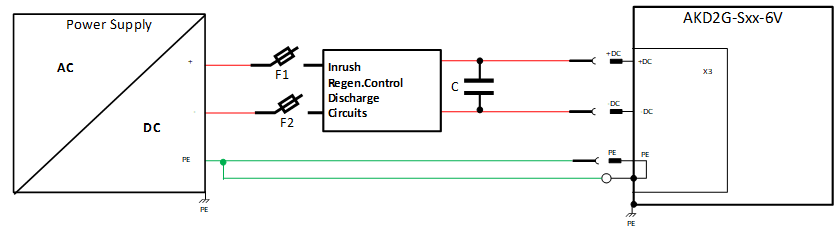
Fig 1. Single Power Supply connection to DC bus Lines.
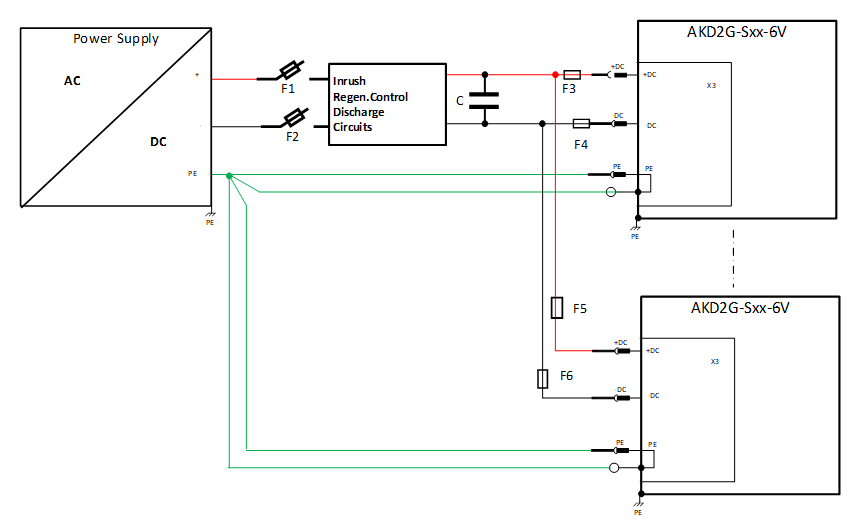
Fig 2. Wiring Multiple Drives.
Bus DC Input Power
Bus input power can be estimated by adding motor shaft power and motor resistive winding loss. The shaft power equation is:
Shaft power (Watt) = Torque (N-m) x Speed (rad/sec)
where rad/sec = rpm/60 x 2π
The equation for motor resistive (heat) loss is:
Winding loss (Watt) = 1.5 x Rline-to-line x IRMS x IRMS
CAUTION! DC Bus capacitor at the output of the main power supply is the key to delivering high peak power. In most applications, the capacitor supplies much of the peak power needed to accelerate the motor and inertia (<20 ms). It also absorbs limited regenerated energy and stabilizes the bus voltage for better dynamics.
NOTE: While the maximum peak-to-continuous power capability is 3:1, some applications have much higher ratios. The requirement that the main supply has a high peak-to-continuous power ratio is very important in selecting or designing the power supply.
Main Supply Output Capacitance (X3-8 to X3-7)
Servo drives demand high peak power from the power supply.
A DC link external capacitor can absorb regenerated mechanical energy from the inertia when the motor decelerates which limits the rise of bus voltage. If the regenerative energy is high, additional bus capacitance can be added. It is also possible to use a larger energy storage device like an ultracapacitor.
In some applications, rotational mechanical energy is dissipated as heat in the motor windings when the motor decelerates. The maximum regenerated rotation energy back to the bus occurs during a low torque deceleration from high speed. In this case, the resistive losses in the motor are low. If mechanical drag is low, much of the stored rotational energy is regenerated to the bus.
| 3/9 ARMS DC | 6/18 ARMS DC |
| 2,000 µf / drive at 75 V bus | 4,000 µf / drive at 75 V bus |
| 4,000 µf / drive at 48 V bus | 8,000 µf / drive at 48 V bus |
| 16,000 µf / drive at 24 V bus | 32,000 µf / drive at 24 V bus |
The worst-case regenerated inductive bus voltage rise is a trip of the bus over-voltage fault when decelerating the motor at full torque. Tripping the bus over-voltage fault, while stopping the flow of regenerative mechanical energy back to the bus, causes a fraction of the inductive energy stored in the windings to regenerate to the bus, causing the bus voltage to go higher than the overvoltage threshold. If there is insufficient bus capacitance to absorb this energy, the bus voltage will rise.
DC Bus capacitance also improves motor dynamics by holding the bus voltage stable during acceleration. An adequately sized bus capacitor helps provide the high peak bus current needed for rapid motor acceleration with minimum bus voltage fluctuation. If the bus voltage sags excessively during acceleration, inverter voltage saturation occurs with loss of motor torque.
Additional bus capacitance lowers peak current requirements of the power supply.
Some regulated supplies do not tolerate an increase in voltage above the supply voltage set point. In this case, insert a diode between the positive supply terminal and the positive capacitor terminal to prevent reverse current flow into the supply. The diode should be a rectifier diode with a voltage and current rating equal to or greater than the supply.
CAUTION! Some DC power supply limits their operating currents. An additional inrush current limiter may be needed to charge DC bus capacitors to protect DC power supply during the initial start-up of the system.
NOTE: Maintain DC Bus voltage within the limits of the DC supply with external regenerative control circuit where applicable.
The connection between the drive and external bus capacitance should have low enough resistance to prevent peak currents from causing excessive voltage drop in the interconnect.
Current can oscillate between capacitors in any distributed DC power system with the capacitor located apart and connected in parallel with wires. The capacitors and wiring inductance form an underdamped LC circuit that can ring when excited by PWM currents. The location of the main output capacitor should be optimized based on the installation layout. Local decoupling capacitance may be required to avoid DC-link resonance. Some dumping RC networks could be placed to avoid further oscillations in the common DC link. In the case of deployment of energy storage devices (ultracapacitors or battery), special care should be taken to adequately manage those devices within their intended operational range.
Additional Considerations
In multi-axis applications, the drive power terminals can be wired separately to the power supplies. It is recommended to add fusing or fuse and disconnect protection for each drive unit. Use caution when the drives are paralleled locally (daisy-chained). Power wires should be appropriately sized to avoid excessive heating and damages.
Proper filtering should be installed in order to meet the applicable UL and CE standards. The quality of the system grounding along with proper mounting of EMI filter in the enclosure is critical for the reduction of conducted and radiated.
The drive must be grounded to the same earth ground as any motion controller, PC or PLC that is connected to the unit. It is also recommended to mount drives to an electrically conductive panel made of aluminum or galvanized steel. This will provide a low impedance path between all components and the use of flat braids or Cu busbars improves high-frequency grounding.
Back to top