





 Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >AKD2G Ethernet IP Command Type 0x08-Velocity Setpoint
This application note demonstrates the command type 0x08-Velocity Setpoint on the AKD2G Ethernet IP drive.
The same command type 0x08-Velocity Setpoint functionality in the AKD1G EIP drive was implemented in the AKD2G EIP. The AKD2G Ethernet IP Communications manual can be downloaded here. The instructions for implementing this mode can be found in the section "Command Type 0x08 - Velocity Setpoint".
To test set the Command Source=Fieldbus and Op mode=Velocity for both axes using Workbench:

To demonstrate forcing was used. The user will want to write PLC code to control the drive as no AOI exists for this mode.
Using AXIS ONE as an example:
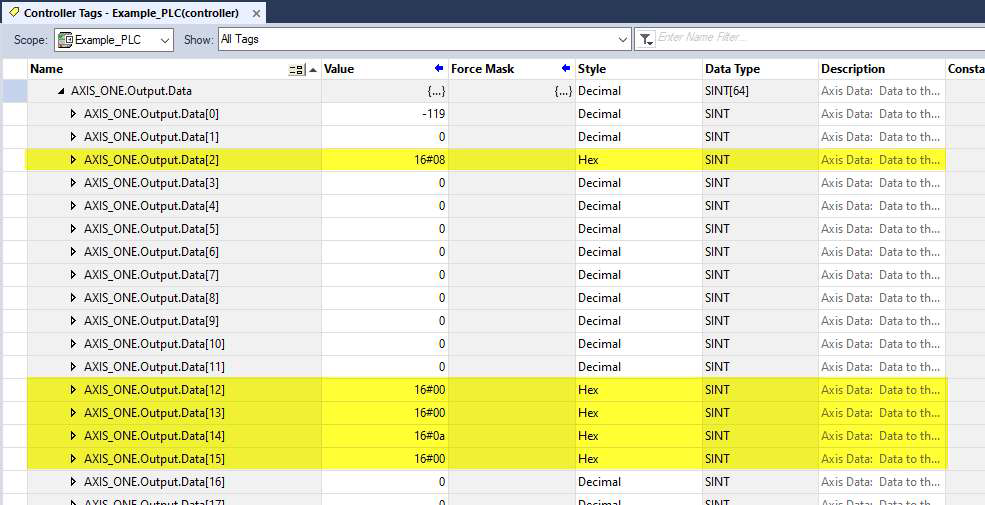
Per the instructions set byte 2 of the command assembly ( output data ) to 0x08.
Set bytes 12-15 to velocity setpoint data ( i.e. in this case 0xA0000=655360 which equates to 10 rps or 600 rpm )
Note below the axis is already enabled ( i.e. set by the AKD_Enable AOI ).
Set the Direction in the Control Word to 1 ( positive ) to demonstrate.

Toggle the load/start bit from 0 to 1 to start rotation.

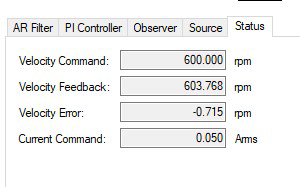
From Workbench the motor is running 600 rpm ( the units were set to rpm for demonstration ).
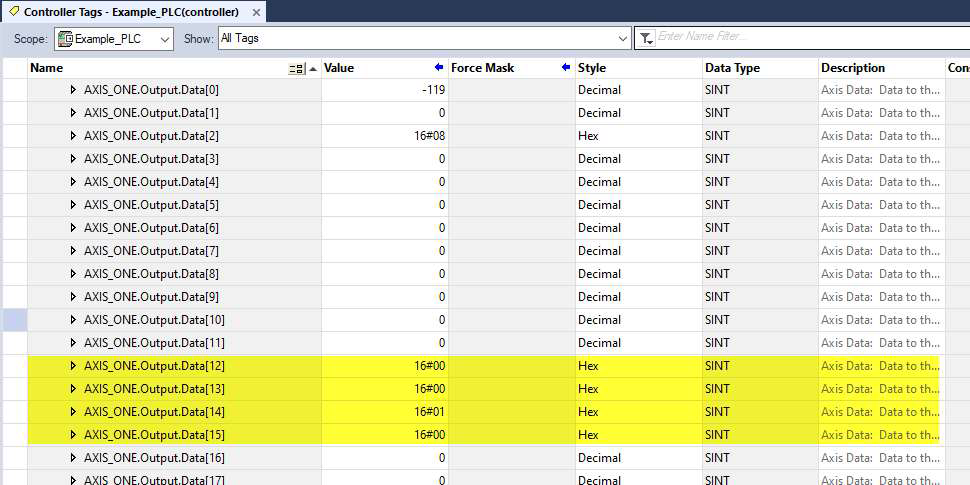
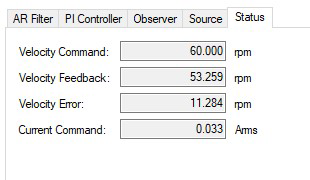
Without changing the control word the velocity setpoint data was changed from 0xA0000 to 0x10000 ( 1 rps or 60 rpm ).
From Workbench
With this setup it is also possible to change the Direction bit in the control word from 1 to 0 and the axis ran at -60rpm ( on the fly ).
Axis 2 works the same way.
