Home >
Home > Knowledge Base >
Knowledge Base > FAQs >
FAQs > Downloads >
Downloads >Tips and Tricks for the AKD Performance Servo Tuner
Tips and Tricks for the AKD Performance Servo Tuner (Autotuner and Bode Tool)
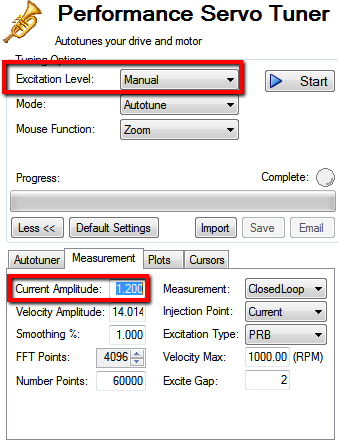
Increase the Excitation Current
If the excitation current is too low, the motor will not be able to move enough to measure a good frequency response. If the autotuner fails to complete because of not moving enough, then increase the excitation current. Set the excitation level to “Manual” and enter a higher current amplitude.
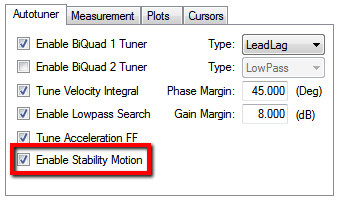
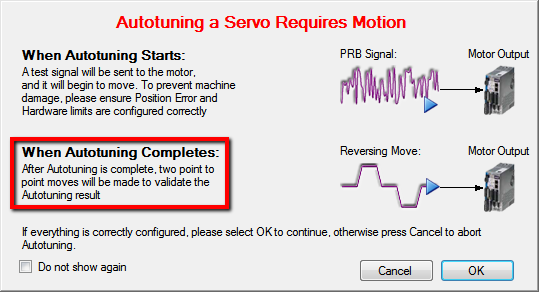
Enable Stability Motion
The stability motion is a reversing move that is generated based on calculations in the autotuner. If you don’t want the motor to move after autotuning or if the motor should not move in the reverse direction, then uncheck the box to disable the move. Keep in mind that the speed, acceleration, and time of the move are not settings in Workbench. They are calculated values based on the frequency response and tuning.
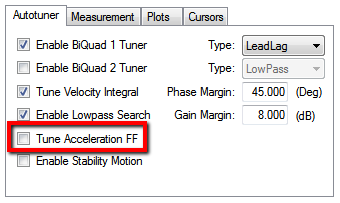
Acceleration Feedforward (IL.KACCFF)
If the “Tune Acceleration FF” box is unchecked, the autotuner will set the Acceleration Feedforward (IL.KACCFF) to zero. It will not affect the Velocity Feedforward. This is useful when using low resolution position commands, such as Analog Position mode or Electronic Gearing mode. Keep in mind that you will want to lower the Velocity Feedforward as well, and must do so manually.
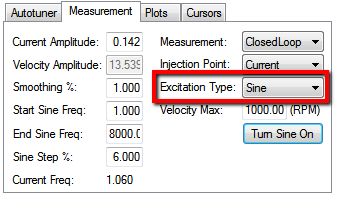
Sine Excitation Type
The Sine excitation type is generally better for systems with lots of mechanical compliance, such as the backlash in gears or the flex of a belt. With Sine excitation, the drive will steadily increase the excitation frequency through the full range. It will take much longer to run the autotuner, but will get a better frequency response.
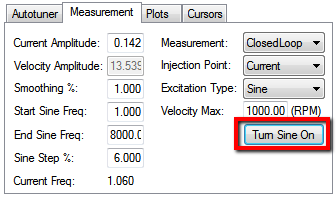
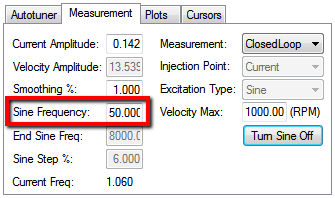
Turn Sine On
The “Turn Sine On”/ “Turn Sine Off” button is used to excite the motor at a set frequency. Enter the frequency in the “Start Sine Freq” and click the “Turn Sine On” button. This can be used to evaluate resonance in a machine at a constant frequency.
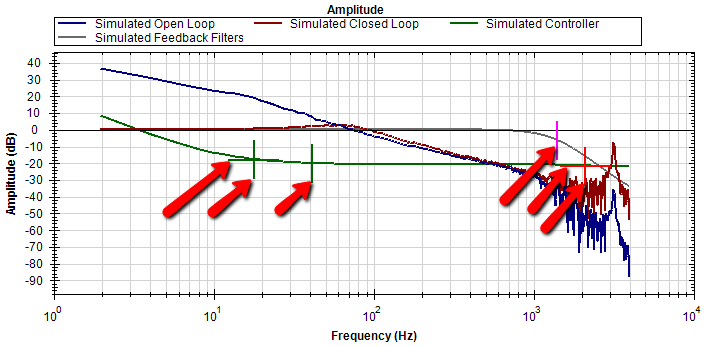
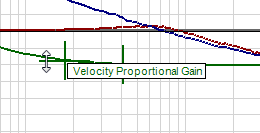
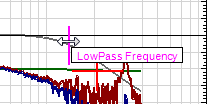
Drag and Drop
The Drag & Drop Tuning feature in the autotuner allows for easy simulation of servo performance by dragging the Simulated Closed Loop plot. As the plot is dragged by the cross-hairs, the gain values will automatically be changed. So you can modify the simulated gains in a graphical manner. Once you get the gains as you want, you can write those gain values to the drive. Make sure to disable the drive before writing the set of new gain values. This method of tuning can actually be done offline. Take a bode plot and save the csv file. Import the csv file into an offline drive in Workbench, modify the tuning and save it again. Then you can import it into your online drive and write the new set of gain values to the drive.
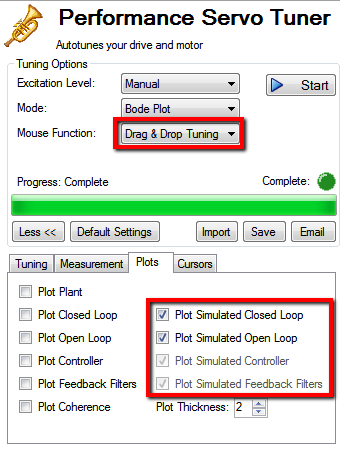
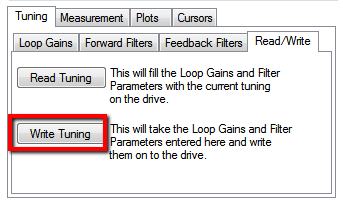
The simulated gain and filter values can be written to the drive. Make sure to disable the drive prior to writing the tuning values, so that the drive does not go unstable as it writes gain values one at a time.