





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Sinus Encoder
Allgemeines
Sinus Encoder sind Sensoren zur relativen Erfassung von Lageänderungen (linear oder rotierend), die sowohl Wegstrecke als auch -richtung erfassen können. Diese Sensoren werden als Rückführsysteme (Feedback Systerme) z.B. in Servo Antriebssystemen eingesetzt. Sinus Encoder liefern nicht die absolute Position zu jedem Zeitpunkt, Sensoren zur jederzeit eindeutigen Erfassung von Winkel- oder Wegpositionen sind die Absolutgeber.
Sinus und Cosinus Kanäle
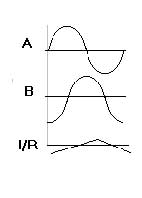
Sinus Encoder sind Inkrementalgebern sehr ähnlich. Lesen Sie daher auch die Informationen zum Inkrementalgeber. Der Unterschied zwischen beiden Gebertypen ist, dass die A und B Kanäle als 1V Spitze - Spitze Sinus- bzw. Cosinussignal zum Servoverstärker gesendet wird anstatt als digitale Pulsfolge. Gängige Ausgangssignalpegel sind TTL, HTL (beides digitale Signale), sowie 1 Vss und 11 µA (analoge Signale).
Referenzimpuls
Nachteilig ist, dass nach einem Spannungsausfall die absolute Position nicht mehr bekannt ist. Deshalb werden z. B. bei Positionierungssystemen nach dem Einschalten sogenannte Referenzfahrten auf einen unabhängigen Positionssensor ausgeführt. Manche inkrementelle Drehgeber geben pro volle Umdrehung noch einen Referenzimpuls (Index, Zero) auf einem dritten Kanal aus, dadurch kann ein externer Referenzgeber entfallen.
Funktionsweise
Sinus Encoder können photoelektrisch oder magnetisch arbeiten.
Photoelektrische Abtastung
Ein Lichtstrahl wird durch einen Kondensor, eine mit Strichen versehene Abtastplatte und eine Blende auf ein photooptisches Bauelement (meist ein Fototransistor) geleitet.
Zwischen der Leuchtdiode und zwei leicht versetzt angeordneten optischen Sensoren befindet sich eine mit Schlitzen versehene Scheibe. Rotiert nun diese Scheibe, wird der Lichtstrahl zwischen LED und Sensoren zyklisch moduliert. Bei einer Bewegung geben die beiden Sensoren zwei um 90 ° phasenverschobene symmetrische sinusähnliche Signale ab. Bei Bewegung nach rechts, ist das Sinussignal des ersten Kanals gegenüber dem zweiten Kanal um 90° voreilend. In der anderen Richtung ist das Sinussignal des ersten Kanals gegenüber dem zweiten Kanal um 90 ° nacheilend.
Magnetische Abtastung
Bei einem inkrementellen Messsystem mit magnetischer Abtastung besteht die Blende aus einem hartmagnetischen Träger, in dem durch Magnetisierung eine Teilung eingeprägt wurde. Die Abtastplatte trägt z. B. vier Hall Elemente, die ähnlich einer optischen Mehrfeldabtastung verschaltet sind. Die Teilungsperiode kann bei diesen Systemen bis zu 5 mm betragen. Die magnetische Abtastung wird angewendet, wenn das Messsystem nicht mit erträglichem Aufwand gekapselt werden kann. Sie kann gegenüber Flüssigkeiten und Schmutz unempfindlich hergestellt werden. Lediglich Fremdkörper dürfen nicht in den Abtastspalt gelangen.
Signalauswertung
Der Servoverstärker wertet die Impulsanzahl, Impulsfrequenz und Phasenlage aus und kann so Weg, Geschwindigkeit und Richtung bestimmen. Aufgrund des Sinusverlaufes der Signale kann auch eine interne Interpolation der Position erfolgen, die eine weitere Erhöhung der Genauigkeit erlaubt.
Wird der Drehgeber in einem Servomotor eingesetzt, verfügt er in der Regel noch über zusätzliche Spuren. Diese stellen normalerweise Spuren für Kommutierungssignale dar. Sie können analog aus um 90° versetzte Sinus/Cosinussignale (sogenannte C/D-Spur oder Z1-Spur) bestehen oder aus Teilkreisen bei der Blockkommutierung.
Applikationsschriften
- Auflösung von Sinus Cosinus Gebern im Servoverstärker
- Überwachung von Sinus Cosinus Gebern
- Sporadische Fehlermeldung F04 mit Jenar Messsystemen
