





Derin deniz altyapılarının bakım ve onarımından atık su havuzlarının denetimine. Tehlikeli petrol ve gaz lokasyonlarından kirli ve tehlikeli inşaat sahalarına. Araştırma numunesi toplamadan afet bölgelerinde arama ve kurtarmaya. Bu uygulamalarda ve daha pek çok uygulamada saha robotları, insanlar için çok kirli ve tehlikeli olan görevleri yerine getiriyor. Süregelen iş gücü kıtlığında robotlar, insanların gerçekleştirmek üzere müsait olmadığı işler için de idealdir.
Saha robotları için temel zorluk, herhangi bir yapıdan yoksun bir ortamda sıklıkla gece gündüz durmadan çalışarak karmaşık görevleri yerine getirmelerinin gerekmesidir. Bu zorlu, uzmanlık gerektiren işleri yerine getirmek için üreticiler, belirli amaçlara yönelik çok çeşitli robotlar tasarlıyor.
Bu robotlar, köprü ve binaların inşa edilmesine yardımcı olan inşaat robotları gibi büyük ve güçlü olabilir. Uzak ve zorlu koşullarda uzun mesafelerde güvenilir şekilde çalışmaları gerekebilir. Örneğin, büyük ebatlı otonom maden kamyonları, otomatik direksiyon ve kontrol sistemlerine ihtiyaç duyabilir. Askeri keşif robotları gibi kompakt ve sinsi olabilirler. Okyanusun derinlikleri veya dünya dışı yüzeyler gibi ekstrem yerlerde kullanılabilirler. Meyve toplamak gibi olağanüstü el becerisi gerektiren görevleri gerçekleştirebilirler.
Bu uzmanlık isteyen uygulamalar; hem maliyet hem de kullanıcı eğitimi açısından giriş engellerini artıran gelişmiş hareket sistemleri, otomasyon yazılımları ve bakım prosedürleri gerektirir. Sonuç olarak, hizmet olarak robotların (RaaS) sunulmasına yönelik ilgi giderek artmaktadır.
Örneğin, inşaat ekipleri, işi daha hızlı ve daha az riskle tamamlarken insanların başka önemli görevlerde yer almasına olanak tanımak üzere aralıksız çalışarak köprü inşaatının birçok aşamasını gerçekleştirecek bir robot kiralayabilir. Robot, işini tamamladığında başka bir iş sahasında kiralanmak üzere RaaS sağlayıcısına iade edilebilir. Kiralanan robotların kullanım oranları özellikle yüksek olabilir ve bu da dayanıklılık ve güvenilirliğin önemini artırır.
Saha Robotunun Hareket Zorlukları ve Gereksinimleri
Robotlar için hareket temel öneme sahiptir ve saha robotlarının hareket gereksinimleri özellikle katıdır. Güvenilirlik, verimlilik ve etkili entegrasyon, çeşitli öngörülemeyen yerlerde çalışması gereken robotların performansı için kilit öneme sahiptir. Robot iş başındayken meydana gelen bir hareket bileşeni arızasının veya bitmiş bir bataryanın ele alınması maliyetli, zaman alıcı ve hatta tehlikeli olabilir.
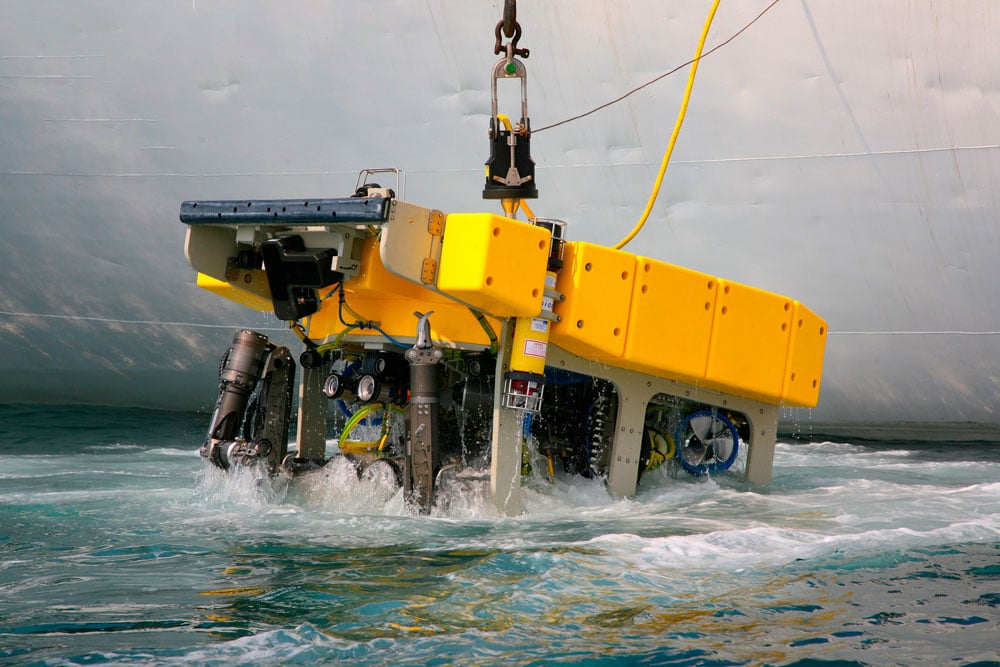
Örneğin, yüksek basınçlı bir ortamda veya bir atık su depolama tankında güç kaybı yaşayan bir su altı robotunu düşünün. Veya insanlar için güvenli kabul edilmeyen derin bir yer altı bölgesinde arızalanan bir maden arama robotunu. Veya 100 milyon milden daha uzakta kritik bir fonksiyonunu kaybeden bir uzay keşif aracını. Bu gibi durumlarda, pahalı bir robot geri getirilemediği sürece kullanışsız hâle gelir ve robotu geri getirmek son derece zor, tehlikeli veya imkânsız olabilir.
Daha kötüsü, arızalı bir robot üretimin durmasına neden olabilir ve inşaat, petrol ve gaz ve madencilik sektörleri ile diğer endüstrilerde plansız duruşların maliyeti astronomik olabilir.
Güvenilir çalışma ve verimli performans sunan hareket sistemleri, arıza riskinin azaltılmasına, iş verimliliğinin artırılmasına ve robotların iş başında kalabildiği sürenin en üst düzeye çıkarılmasına yardımcı olur. Bu robotlar için belirlenen motorlar şu özelliklere sahip olmalıdır:
- Gerinim dalgası dişlileri veya diğer vites bileşenleri gibi robot tasarımının diğer unsurlarıyla uygun şekilde entegre olmalıdır.
- Optimum hız aralığı dâhilinde çalışırken uygulamanın sürekli ve azami tork gereksinimlerini karşılayacak şekilde doğru boyutta olmalıdır.
- Uygulamanın performans gereksinimlerini karşılarken mümkün olduğunca kompakt olmalıdır.
- Karşılaşılacak en aşırı ortam sıcaklıklarına rağmen aşırı ısınmaya karşı dayanıklı olması ve tam performans sağlaması için sıcaklık artışı sınırlı olmalıdır.
- Saha robotunun karşılaşabileceği tüm koşullara dayanacak şekilde sağlam ve güvenilir bir biçimde üretilmelidir.
- Su altı robotları için dalgıç motorlar, kirli ve hava şartlarına maruz kalan uygulamalarda kullanılan yıkanabilir motorlar veya tehlikeli yerler için uygun sertifikalara sahip, patlamaya dayanıklı motorlar gibi her türlü uzmanlık gerektiren uygulamanın gereksinimlerini karşılayacak şekilde tasarlanmış ve üretilmiş olmalıdır.
- Robot programının süresi boyunca, dünyanın her yerine güvenilir bir şekilde teslim edilmeli ve dünyanın her yerinde desteklenmelidir.
Kollmorgen aşağıdakileri sunar
Kol eklemleri ve diğer robotik uygulamalar için optimize edilmiş sektörün en yüksek performanslı motorlarını tasarlama ve teslim etme konusunda onlarca yıllık deneyimiyle Kollmorgen, başarısızlığın bir seçenek olmadığı durumlarda saha robotlarının zorlu gereksinimlerinin nasıl karşılanacağını biliyor.
En kritik özelliklerden birkaçı yüksek kutup sayısı, çekirdek kayıplarını en aza indirmek üzere tasarlanmış sarımlar ve statik sürtünme ve viskoz sönümlemeyi en aza indiren laminasyonlardır. Tüm bu özellikler, motorların daha yüksek sistem güvenilirliği için daha uzun bir çalışma süresi boyunca ve daha düşük sıcaklık artışıyla daha verimli bir şekilde çalışmasını sağlar.
Robot eklemleri için tasarlanan gövdesiz motorlar, güç/geri besleme kablolarını ve diğer bileşenleri kolayca barındırırken genel eklem ağırlığını, uzunluğunu ve ataletini azaltan geniş bir iç çap ve yüksek iç çap/dış çap oranı sunar. Çoğu gövdesiz motor, daha ekonomik ve güvenilir bir robot tasarımı için piyasadaki harmonik (gerinim dalgası) dişli tasarımlarıyla uyumlu olacak şekilde tasarlanmaktadır.
Kollmorgen ayrıca her uygulamanın tam hız, sürekli tork ve azami tork ihtiyaçlarını karşılamak için motor sarımlarını uygun maliyetli bir şekilde değiştirebilir. Sistem verimliliğini ve güvenilirliğini düşüren aşırı büyük veya küçük bir motorla risk almak yerine, Kollmorgen motorları, her uygulamanın gerektirdiği tam performansı ağırlık, alan ve enerji açısından en verimli pakette sağlar.
Kollmorgen ayrıca derin deniz, tehlikeli yerler, hava şartlarına maruz kalan ortamlar, yıkama ortamları, yüksek rakımlı ortamlar, dünya dışı ortamlar ve diğer ekstrem ortamlarda kullanılmak üzere tasarlanmış motorlar sunar. Yüksek uzmanlık gerektiren bu kadar çeşitli uygulamalarda OEM’lerin yeni saha robotu tasarımlarını piyasaya sunmak için çalışırken hızlı prototip oluşturulmasını talep etmesi ve başlangıçta düşük hacimli siparişler vermesi yaygın bir durumdur. Çoğu hareket tedarikçisi bu talepleri reddetse de Kollmorgen, uzmanlık gerektiren bu projeleri memnuniyetle karşılar.
Kollmorgen’ın iş birliğine dayanan kültürü, ürün seçeneklerinin çeşitliliği, eşsiz mühendislik yetenekleri ve yerel tasarım ekipleri, tasarım döngülerini azaltmanıza ve daha yetenekli, güvenilir ve daha uzun süre çalışan bir saha motorunu piyasaya sunmanıza yardımcı olabilir. Küresel üretim ve destek tesisleri, tutarlı kalite taahhüdü ve onlarca yıllık kanıtlanmış robotik uzmanlığıyla Kollmorgen, saha robotunuzun uzun vadeli başarısını garanti altına almaya yardımcı olabilir.
Daha Fazla Bilgi
Online eğitim oturumumuz Motor Tasarımı ve Seçimi Yoluyla Robot Verimliliğini Artırma bölümünde robotik motor tasarımının en zorlu sorunlarını nasıl çözdüğümüzü görün. Robota hazır olacak şekilde özel olarak tasarlanmış bir motorun avantajlarını öğrenmek için TBM2G Gövdesiz Motorlar broşürümüzü okuyun. Ardından, benzersiz proje gereksinimleriniz hakkında mühendisten mühendise bir görüşme için bizimle iletişime geçin.




")



