Wir alle machen Fehler – selbst Maschinenbauer. Ein Fehler ist oft eine Chance, etwas zu lernen und an den Lehren zu wachsen.Oder, wie der irische Autor Samuel Beckett es ausdrückte: „Wieder versuchen. Wieder scheitern. Besser scheitern.“
Aber um ein marktfähiges Produkt zu entwickeln, muss dieser Zyklus des Scheiterns und Verbesserns letztendlich zum Erfolg führen. Natürlich ist es am besten, es gleich beim ersten Mal richtig zu machen. Wir sind hier, um zu helfen.
Nachdem Sie Ihre Auswahl an Antriebstechnologien evaluiert und sich für ein Stepper-System entschieden haben, müssen Sie den optimalen Motor und Antrieb für Ihre Anwendung auswählen. In diesem Bereich werden allzu leicht Fehler gemacht, die sich auf die Entwicklungszeit und die Kosten auswirken.
Betrachten wir also die fünf häufigsten Fehler an, die Ingenieure bei der Spezifikation und Arbeit mit Schrittmotoren und den zugehörigen Antrieben machen, die daraus resultierenden Probleme und wie sie vermieden werden können. Wir werden zudem fünf bewährte Verfahren auflisten, um die richtige Wahl zu treffen.
Fehler 1: Annahme, dass ein Motor seine Drehzahl- und Drehmomentwerte liefert, wenn er mit einem beliebigen Schrittmotorantrieb kombiniert wird
Bei Servomotoren ist Ihnen wahrscheinlich bereits bekannt, dass Nenndrehmoment, Stillstandsmoment und Drehzahl alle unter idealen Bedingungen angegeben werden. Die Werte, die sich in der Praxis ergeben, hängen daher sowohl von der Kombination aus Antrieb und Motor als auch von der zur Verfügung stehenden Spannung und Stromstärke ab. Das gleiche Prinzip gilt für Schrittmotoren und -antriebe.
Der zuverlässigste Weg, um sicherzustellen, dass Sie die gewünschte Schrittmotorleistung erhalten, ist die Modellierung eben dieser in Verbindung mit der verfügbaren Spannung und Stromstärke eines bestimmten Antriebs, der die erforderlichen Funktionen aufweist. Die Erstellung einer Leistungskurve (Drehzahl-Drehmoment-Kurve) für den passenden Motor und Antrieb dient als zuverlässigste Referenz.
Das Online-Tool Stepper Optimizer von Kollmorgen erleichtert Ihnen diesen Prozess. Wählen Sie zunächst einen Motor aus, der physikalisch für Ihre Anwendung geeignet ist, und passen Sie dann die verfügbare Spannung und den verfügbaren Strom an, um eine Drehmoment-/Drehzahlkurve für Ihren Antrieb zu erstellen. Alternativ können Sie auch das erforderliche Drehmoment/die Drehzahl oder das grundlegende Bewegungsprofil eingeben und das Tool findet automatisch die beste Lösung für Ihre Anwendung.
Es ist zu beachten, dass das Stillstandsdrehmoment eines Motors nichts über das Drehmoment aussagt, das er während der Fahrt erzeugen kann, insbesondere beim Beschleunigen und Abbremsen, wenn ein höheres Drehmoment erforderlich ist. Wenn Sie den Stepper Optimizer verwenden, um ein System basierend auf den tatsächlichen dynamischen Anforderungen Ihrer Anwendung auszuwählen, können Sie diesen Fehler vermeiden.
Fehler 2: Spezifizierung eines Mikroschrittantriebs aus den falschen Gründen
Wenn Sie die größtmögliche Kontrolle über Geschwindigkeit und Position wünschen, ist ein Servosystem wahrscheinlich die bessere Wahl für Ihre Anwendung. Es mag nahe liegen, stattdessen einen Schrittmotor und einen Mikroschrittantrieb zu spezifizieren, in der Annahme, eine vergleichbare Genauigkeit zu erreichen, ohne notwendigerweise eine Regelung mit Feedbacksystem zu benötigen. Das kann sich als Fehler erweisen.
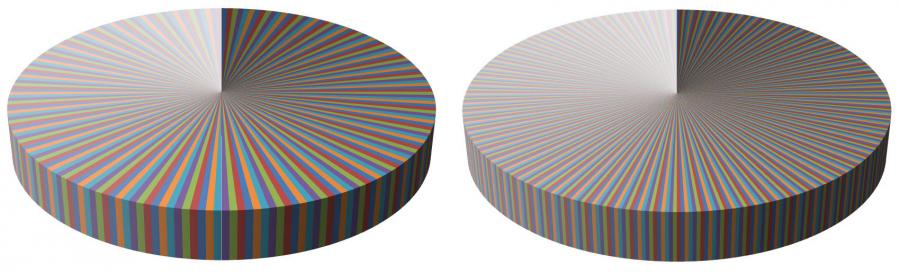
Die Mikroschritttechnik wurde entwickelt, damit Motoren die Auswirkungen von Lärm und Vibrationen in den unteren Resonanzbereichen überwinden oder sogar kontinuierlich in diesen unteren Bereichen laufen können. Der Antrieb unterteilt den 1,8°-Schrittwinkel in bis zu 250 Mikroschritte, aber diese einzelnen Impulse sind möglicherweise nicht gleichmäßig. Motorposition und -geschwindigkeit sind nicht unbedingt bis in den Mikroschrittbereich konstant. Ein Mikroschrittantrieb liefert zwar eine höhere Auflösung als ein Standard-Schrittantrieb, dies garantiert jedoch nicht unbedingt eine höhere Genauigkeit.
Ein wesentlicher Vorteil des Mikroschrittverfahrens ist die Reduzierung von Vibrationen, Geräuschen und Klopfen bei niedrigen Motordrehzahlen. Dies bringt uns zu einem weiteren potenziellen Fehler – der Erwartung, dass ein Mikroschrittantrieb alle Resonanzprobleme mindert. Zusätzlich zu niedrigen Geschwindigkeiten können Schrittmotoren auch eine Resonanzperiode im mittleren Geschwindigkeitsbereich aufweisen. Der Mikroschrittbetrieb wird bei diesem Problem nicht helfen. Stattdessen ist die Wahl eines Antriebs mit Resonanz-Algorithmen der beste Weg, um diese Resonanzen zu bewältigen.
Fehler 3: Unter- oder Überdimensionierung des Motors
Ein zu kleiner Schrittmotor führt bestenfalls zu übermäßiger Wärmeentwicklung, unbefriedigenden Beschleunigungs- und Verzögerungswerten und allgemein zu schlechter Leistung. Im ungünstigsten Fall verliert der Motor bei hoher Last oder hohen Beschleunigungs- und Verzögerungswerten Impulse, positioniert sich falsch oder bleibt ganz stehen.
Eine Überdimensionierung des Motors führt dazu, dass er mehr hörbare Geräusche sowie höhere EMI/RFI-Störungen erzeugt. Dies kann auch höhere Kosten für Motor und Antrieb, Platzverschwendung und eine Maschine bedeuten, die größer und schwerer ist als nötig.
Der Stepper Optimizer von Kollmorgen kann Ihnen dabei helfen, diese grundlegenden Fehler zu vermeiden, und Ihnen den Motor vorschlagen, der am besten zu den Größen- und Leistungsanforderungen Ihrer Anwendung passt.
Fehler 4: Schlechte Anpassung der Last-Motor-Trägheit
Die alten Regeln für die Trägheitsanpassung von Servosystemen gelten nicht mehr. Bei Schrittmotorsystemen ist die Berücksichtigung der Last-Motor-Trägheit jedoch von Bedeutung, da es sich bei diesen Systemen in der Regel um offene Systeme handelt. Selbst wenn man einen Encoder hinzufügt, um ein geschlossenes Schrittmotorsystem zu erhalten, darf die Trägheitsfehlanpassung nicht viel mehr als eine Größenordnung von 10:1 betragen, ohne dass der Motor Impulse verliert, die Last falsch positioniert, übermäßig Strom zieht oder sogar zum Stillstand kommt.
Fehler 5: Nichtbeachtung der Eigenfrequenzen der Maschine
Ingenieure sollten die charakteristische Frequenz (Omega-Eigenfrequenz) der Maschine sowie ihre Antiresonanzfrequenz kennen und Sollgeschwindigkeiten vermeiden, die innerhalb des Eigenfrequenzbereichs des Systems liegen. Ein Mikroschrittantrieb mit Antiresonanzschaltung hilft hier sehr, aber die Maschine wird bei bestimmten Motordrehzahlen immer noch klingen, wenn nicht darauf geachtet wird, eine Motor- und Antriebskombination zu wählen, die außerhalb dieser Resonanzen arbeiten kann. Die Wahl des falschen Schrittmotors für eine solche Anwendung kann zu einer lauten Maschine führen, die bei bestimmten Geschwindigkeiten vibriert und unzuverlässig arbeitet.
5 bewährte Verfahren, um beim ersten Mal die richtige Wahl zu treffen
- Vergewissern Sie sich, dass Sie die mechanischen Grenzen und Anforderungen Ihrer Maschine kennen, wie beispielsweise mechanische Resonanzfrequenz, mechanische Bandbreite, Lastträgheit (idealerweise ≤ 10:1), Haft- und Gleitreibung usw. Dies gilt für alle Geräte, die Bewegungen ausführen, unabhängig von ihrer Genauigkeit.
- Verwenden Sie ein Auslegungsprogramm wie den Stepper Optimizer von Kollmorgen, um Ihr System auf Grundlage zuverlässiger Drehzahl-Drehmoment-Leistungskurven richtig zu dimensionieren.
- Wählen Sie einen Antrieb, der für die verfügbare Busspannung geeignet ist und die erforderlichen Eigenschaften aufweist. Außerdem ist ein Motor zu wählen, der die erforderliche Leistungskurve aufweist - außerhalb der Resonanzfrequenz der Maschine, wenn er auf den Antrieb abgestimmt ist.
- Erzwingen Sie keine Hochgeschwindigkeits- oder Präzisionsbewegungen mit einem Schrittmotor, für die ein Servo besser geeignet ist. Servos sind wie Schrittmotoren im Laufe der Jahre immer günstiger und viel einfacher zu handhaben geworden.
- Holen Sie sich Engineering Unterstützung. Kollmorgen bietet die leistungsstärksten Motoren und Antriebe der Branche, aber wir sind viel mehr als nur ein Lieferant. Unser Ziel ist die Optimierung Ihrer Anwendung. Nehmen Sie Kontakt mit unseren Antriebsexperten auf und beginnen Sie noch heute mit der Optimierung Ihrer Maschine.