O diagrama de Bode existe desde 1930, quando Hendrik Bode elaborou uma forma de exibir gráficos de amplitude e de mudança de fase no domínio da frequência. Atualmente, produzir um gráfico detalhado de resposta de frequência que revela a impressão digital única de um servomecanismo no domínio da frequência é tão simples quanto pressionar uma tecla de computador. Este artigo aborda os cinco itens principais que compõem um diagrama de Bode e o que eles revelam sobre a máquina.
Um diagrama de Bode é uma combinação de gráficos de amplitude e de resposta de fase relacionados a um servomecanismo submetido a uma faixa de frequências injetada no sistema. O modo exato pelo qual o diagrama de Bode é gerado envolve um pouco de matemática avançada, mas, com os poderosos microprocessadores da atualidade, o processamento numérico pode ser realizado em questão de segundos. As medidas de amplitude (dB) e fase (graus) são representadas em escala logarítmica em toda a faixa de frequência testada. Os gráficos mostram o quão bem o sistema mecânico responde a uma faixa de frequências. As mudanças de amplitude e fase se adequarão a um padrão determinado que é baseado no projeto do mecanismo e, a partir desse padrão, as informações sobre o sistema são reveladas.

Figura 1: em um sistema perfeito, o diagrama de amplitude terá uma inclinação reta negativa de -20 dB/década. A fase deve iniciar em -90° e cair com uma inclinação negativa a partir do ponto em que a amplitude atravessa 0 dB.
Em frequências muito baixas, o sistema mecânico segue o sinal injetado e permanece em fase com a frequência ou amplitude. À medida que a frequência aumenta, a amplitude da resposta mecânica cai, enquanto a fase começa a sofrer atraso. Isso pode ser demonstrado enrolando uma tira elástica em várias arruelas que estão suspensas. À medida que você movimenta a tira de borracha lentamente para cima e para baixo, as arruelas acompanham rigorosamente o movimento. À medida que você movimenta a tira cada vez mais rapidamente, a frequência aumenta, e as arruelas não conseguem mais acompanhar o movimento por conta da conformidade na tira elástica. Em variadas velocidades, a arruelas terão o movimento totalmente interrompido, se movimentarão de forma descontrolada ou até mesmo na direção oposta à do movimento desejado.
Frequência de acomodação
A frequência de acomodação está diretamente relacionada ao tempo de acomodação do mecanismo. Quanto maior a frequência de acomodação, menor será o tempo de acomodação a um comando de posição ou velocidade. A frequência de acomodação de um mecanismo está diretamente relacionada à produtividade do sistema. No diagrama de Bode de malha aberta, a frequência de acomodação é determinada na frequência em que o gráfico de amplitude atravessa 0 dB.

Figura 2: a frequência de acomodação do sistema é o ponto em que o diagrama de malha aberta atravessa 0 dB no diagrama de amplitude.
Estabilidade
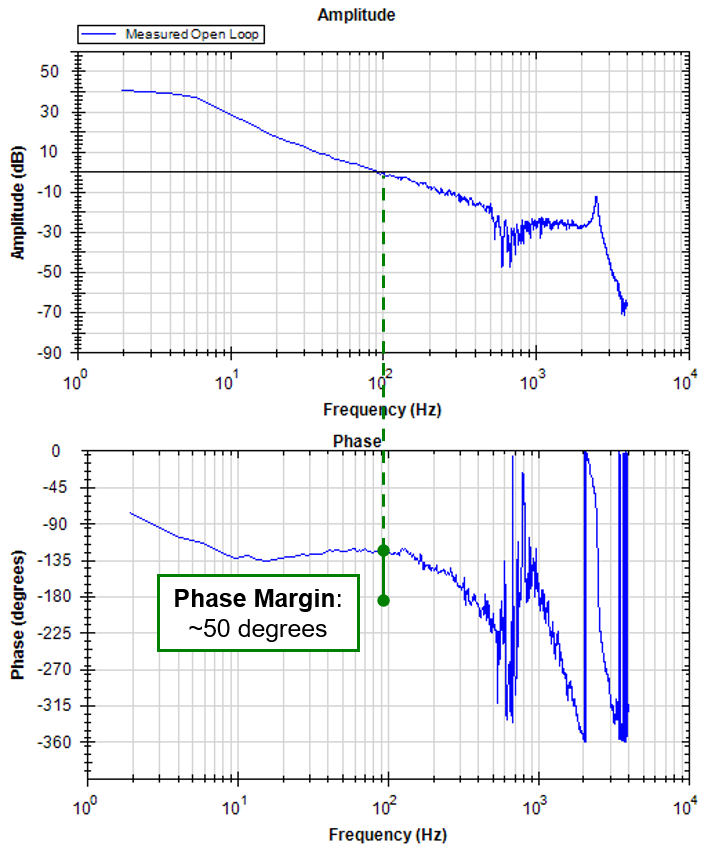
A estabilidade de um sistema está relacionada a quão bem o sistema se comporta durante todos os aspectos da operação. Um servomecanismo é considerado estável quando o sistema opera suavemente e nunca fica errático em movimento ou em repouso. As margens de fase e amplitude particularmente são boas indicadoras da estabilidade do sistema e também podem ser derivadas do gráfico de malha aberta. Quanto maior as margens, mais estável é o sistema. Especificamente, a margem de amplitude é o valor do gráfico de amplitude abaixo de 0 dB (medição em dB) na primeira vez em que a fase alcança -180 graus. A margem de fase é a diferença entre o valor da fase e -180 graus no ponto em que o valor da amplitude atravessa 0 dB. O entendimento da estabilidade de um sistema oferece uma clara indicação se esse sistema terá um desempenho uniforme e confiável em todas as condições.

Figura 3: medições de fase e margem de amplitude indicando estabilidade relativa
Antirressonâncias e ressonâncias
Os elementos fundamentais de qualquer sistema são as várias frequências de ressonância associadas a qualquer deformação mecânica em todo o sistema. Cada elemento mecânico de um sistema terá a própria frequência de ressonância natural (o diagrama de Bode revela cada um deles), que mostra tanto um ponto de antirressonância quanto um ponto de ressonância, em que o elemento mecânico é desacoplado do sistema (nó antirressonante) ou agitado em seu ponto de ressonância (nó ressonante). Cada par de nós está relacionado a um elemento de conformidade no sistema. Embora um sistema possa ter vários nós ressonantes, o primeiro conjunto de nós (a frequência mais baixa) é o mais crítico, uma vez que não é possível atingir uma frequência de acomodação superior à frequência do primeiro nó antirressonante. Os pontos ressonantes fornecem dicas sobre como é possível otimizar o sistema por meio de ajustes.

Figura 4: relação entre a configuração mecânica e o que aparece no diagrama de Bode
Relação entre rigidez e carga e a inércia do motor
Outra revelação interessante do diagrama de Bode é a magnitude da relação entre carga e inércia. Em um sistema simples de dois corpos, a largura (diferença na frequência) do primeiro nó antirressonante para o primeiro nó ressonante é proporcional à relação de inércia – quanto maior a diferença, maior será a relação entre carga e inércia do motor. Entender a relação entre rigidez e carga e a inércia do motor é fundamental para compreender o desempenho do sistema.

Quanto maior a lacuna entre as frequências de antirressonância e ressonância, maior a incompatibilidade inercial
Quanto maior a frequência do primeiro nó antirressonante, mais rígido será o mecanismo. A equação a seguir ajuda a identificar o primeiro nó antirressonante:

Em que K é a rigidez do sistema, e JM é a inércia do motor
A ressonância do sistema é calculada da seguinte forma:

Em que K é a rigidez do sistema, JM, a inércia do motor, e JL, a inércia da carga
Tuning do plano de ataque
Os pontos anteriores fornecem informações importantes para o ajuste do sistema e a otimização do desempenho. No intuito de aprimorar a resposta do sistema, podem ser aplicadas diversas técnicas de filtragem, incluindo os filtros lead lag, entalhe ou bi-quad. A aplicação de uma combinação de filtros permite modificar os valores de amplitude e fase, a fim de aprimorar as margens de fase e ganho, melhorar a frequência de acomodação ou eliminar possíveis problemas de ressonância. O entendimento dos resultados gerais do gráfico possibilita a tomada de decisões de filtragem informadas para ajustar o sistema.
Conclusão
O diagrama de Bode é uma ferramenta essencial para ajudar a diagnosticar e ajustar um sistema, visando otimizar o desempenho do servo. Assim que o sistema é ajustado para o melhor desempenho, é possível adotar a captura do diagrama de Bode como um "gráfico padrão ouro" de referência, para fins de comparação de manutenção preventiva ou preditiva. Na comparação ao gráfico padrão ouro, os casos em que a correia sincronizadora ou o acoplamento estiverem frouxos serão indicados como uma anomalia, possibilitando a correção antes que ocorram danos. Embora este artigo tenha abordado apenas alguns dos elementos revelados pelo diagrama, existem ferramentas de Bode mais avançadas que permitem o maior entendimento de toda a estrutura da máquina e indicam rapidamente as áreas que requerem atenção.