Bode-Diagramme gibt es seit den 1930er Jahren, als Hendrik Bode eine Möglichkeit entwickelte, Verstärkungs- und Phasenverschiebungsdiagramme im Frequenzbereich darzustellen. Heute ist die Erstellung eines detaillierten Frequenzgang-Diagramms, das den einzigartigen Fingerabdruck eines Servomechanismus im Frequenzbereich zeigt, so einfach wie das Drücken einer Computertaste. In diesem Dossier werden fünf Schlüsselpunkte in einem Bode-Diagramm erörtert und was sie über die Maschine aussagen.
Ein Bode-Diagramm ist eine Kombination aus Amplituden- und Phasengang-Diagrammen, die sich auf einen Servomechanismus beziehen, der einer Reihe von in das System eingespeisten Frequenzen ausgesetzt ist. Für die Generierung des Bode-Diagramm ist höhere Mathematik erforderlich, aber mit den heutigen leistungsstarken Mikroprozessoren kann die Berechnung der Zahlen in Sekundenschnelle durchgeführt werden. Die Maße von Amplitude (dB) und Phase (Grad) werden auf einer logarithmischen Skala über den getesteten Frequenzbereich grafisch dargestellt. Die Grafiken zeigen, wie gut das mechanische System auf eine Reihe von Frequenzen reagiert. Die Änderungen in Amplitude und Phase passen in ein bestimmtes Muster, das auf dem Design des Mechanismus basiert, und aus diesem Muster werden Informationen über das System offengelegt.

Abbildung 1: In einem perfekten System hat das Amplitudendiagramm eine geradlinige negative Steigung bei -20 dB/Dekade. Die Phase sollte bei -90° beginnen und bei einer negativen Steigung von dem Punkt an abfallen, an dem die Amplitude Null dB kreuzt.
Bei sehr niedrigen Frequenzen folgt ein mechanisches System dem injizierten Signal und bleibt in Phase mit der Frequenz oder Amplitude. Mit steigender Frequenz nimmt der mechanische Amplitudengang ab, während die Phase nachzulaufen beginnt. Dies lässt sich demonstrieren, indem man ein Gummiband hält, das durch mehrere herunterhängende Unterlegscheiben geschlungen ist. Wenn das Gummiband langsam auf und ab bewegt wird, werden die Unterlegscheiben der Bewegung genau folgen. Wird das Band immer schneller bewegt, nimmt die Frequenz zu, und die Unterlegscheiben können aufgrund der Gefügigkeit im Gummiband nicht mithalten. Bei verschiedenen Geschwindigkeiten kommen die Unterlegscheiben zum Stillstand, geraten außer Kontrolle oder bewegen sich sogar entgegen der gewünschten Bewegungsrichtung.
Bandbreite
Bandbreite steht in direktem Zusammenhang mit der Einschwingzeit des Mechanismus. Je höher die Bandbreite, desto kürzer ist die Zeit, um sich auf eine Sollgeschwindigkeit oder Position einzustellen. Die Bandbreite eines Mechanismus steht in direktem Zusammenhang zur Produktivität des Systems. Im Bode-Open-Loop-Diagramm wird die Bandbreite bei der Frequenz bestimmt, bei der die Amplitudendarstellung Null dB kreuzt.

Abbildung 2: Die Systembandbreite ist der Punkt, an dem das Open-Loop-Diagramm 0 dB in der Amplitudendarstellung kreuzt.
Stabilität
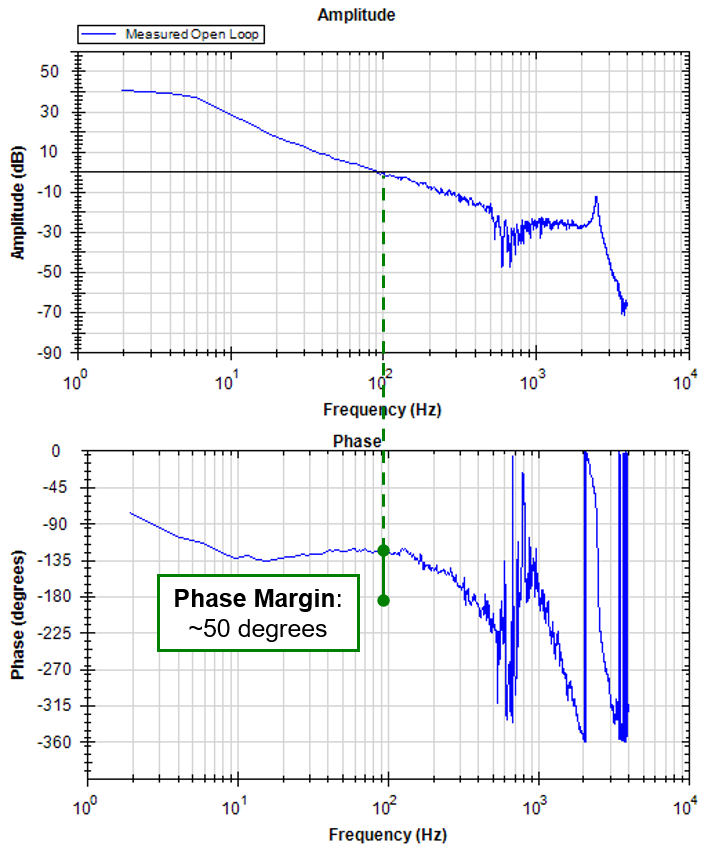
Die Stabilität eines Systems bezieht sich darauf, wie gut sich das System während aller Aspekte des Betriebs verhält. Ein Servomechanismus gilt als stabil, wenn das System reibungslos funktioniert und während der Bewegung oder im Ruhezustand keine Unregelmäßigkeiten zeigt. Phasen- und Verstärkungsspannen sind besonders gute Indikatoren für die Systemstabilität und können auch aus dem Open-Loop-Diagramm abgeleitet werden. Je größer der Spielraum, desto stabiler ist das System. Konkret, der Verstärkungsspielraum der Wert des Amplitudendiagramms ist unter 0 dB (gemessen in dB), wenn die Phase zuerst -180 Grad erreicht. Der Phasenrand ist die Differenz zwischen dem Phasenwert und -180 Grad an dem Punkt, an dem der Amplitudenwert 0 dB kreuzt. Die Kenntnis der Systemstabilität liefert einen klaren Hinweis darauf, ob es unter allen Bedingungen reibungslos und zuverlässig funktioniert.

Abbildung 3: Messungen der Phasen und Amplitudenreserven, die die relative Stabilität anzeigen
Anti-Resonanzen und Resonanzen
Schlüsselelemente eines jeden Systems sind die verschiedenen Resonanzfrequenzen, die mit jeder mechanischen Nachgiebigkeit im gesamten System verbunden sind. Jedes mechanische Element eines Systems hat eine spezifische Eigenresonanzfrequenz (das Bode-Diagramm stellt jede einzeln dar), die sowohl eine Anti-Resonanz als auch einen Resonanzpunkt zeigt – wo das mechanische Element vom System entkoppelt ist (Anti-Resonanzknoten) oder an seinem Resonanzpunkt angeregt wird (Resonanzknoten). Jedes Knotenpaar bezieht sich auf ein konformes Element im System. Während ein System mehrere Resonanzknoten haben kann, ist die erste Gruppe von Knoten (niedrigste Frequenz) die kritischste, da eine höhere Bandbreite als die erste antiresonante Knotenfrequenz nicht erreicht werden kann. Die Resonanzpunkte geben Hinweise darauf, wie das System durch Systemabstimmungen optimiert werden kann.

Abbildung 4: Abstimmung des mechanischen Aufbaus auf die Ergebnisse des Bode-Diagramms
Steifigkeit und Last-Motor-Trägheit
Ein weiteres interessantes Ergebnis des Bode-Diagramms ist die Größe des Verhältnisses zwischen Last und Trägheit. In einem einfachen Zweikörpersystem ist die Breite (Frequenzdifferenz) des ersten Anti-Resonanzknotens zum ersten Resonanzknoten proportional zum Trägheitsverhältnis – je größer die Differenz, desto größer das Verhältnis von Last zu Motorträgheit. Die Beziehung zwischen Steifigkeit und Last-Motor-Trägheit ist entscheidend für das Verständnis der Systemleistung.

Je größer der Abstand zwischen der Anti-Resonanz- und der Resonanzfrequenz ist, desto höher ist die Trägheitsfehlanpassung
Je höher die Frequenz des ersten Anti-Resonanzknotens, desto steifer ist der Mechanismus. Die folgende Gleichung hilft bei der Identifizierung des ersten antiresonanten Knotens:

wobei K die Steifigkeit des Systems und JM die Trägheit des Motors ist
Die Resonanz des Systems wird berechnet als:

wobei K die Steifigkeit des Systems, JMdie Trägheit des Motors und JL die Trägheit der Last ist
Abstimmung des Angriffsplans
Die vorstehenden Punkte liefern wichtige Informationen zur Abstimmung des Systems für eine optimierte Leistung. Zur Verbesserung der Reaktion des Systems kann eine Vielzahl von Filtertechniken angewendet werden, einschließlich Lead-Lag-, Notch- oder Bi-Quad-Filtern. Durch Anwendung einer Kombination von Filtern können die Amplituden- und Phasenwerte geändert werden, um die Phasen- und Verstärkungsspannen zu verbessern, die Bandbreite zu erhöhen oder potenzielle Resonanzprobleme zu beseitigen. Die Kenntnis der Gesamtergebnisse des Diagramms führt zu sachkundigen Entscheidungen für den Einsatz von Filtern zur Systemabstimmung.
Fazit
Das Bode-Diagramm ist ein wichtiges Tool bei der Diagnose und Abstimmung eines Systems zur Optimierung der Servoleistung. Sobald ein System auf beste Leistung eingestellt ist, kann das erfasste Bode-Diagramm als „goldenes Diagramm“ für den Vergleich mit der Basislinie für die präventive oder vorausschauende Wartung verwendet werden. Im Vergleich zum goldenen Diagramm wird eine lockere Kupplung oder ein loser Zahnriemen als Anomalie angezeigt und kann korrigiert werden, bevor ein Schaden auftritt. Während dieses Dossier nur einige wenige der durch das Diagramm aufgedeckten Punkte berührt hat, gibt es fortgeschrittenere Bode-Tools, die das Verständnis der gesamten Maschinenstruktur weiter erhöhen und schnell Bereiche aufzeigen können, die angegangen werden müssen.