Home >
Home > Knowledge Base >
Knowledge Base > Community >
Community > Downloads >
Downloads >EnDat 2.2 and FB3.ENCRES setting and scaling
Problem description
General description of the mechanic:

Resulting problem
Between primary feedback and third feedback we have got a gear ratio. Closing the position loop with the third feedback will cause the problem, that the input value for the velocity loop (which is working based on the primary feedback) is wrong, as it doesn't account for the gear ratio.
Therefore two possible solutions:
1.) increase the tuning gains -> thus good positioning but negative effect on velocity loop
2.) implement the gear ratio into the third feedback scaling -> FB3.ENCRES
Solution
Scaling third feedback with FB3.ENCRES (from Workbench help):
Linear Example:
Linear encoder resolution can be calculated as the number of encoder counts per one revolution of the motor. For example, if a linear setup has a 10nm scale (100,000
counts/mm), and the ballscrew has a 10mm lead with no gearbox, it will result in 1,000,000 counts for every revolution of the motor shaft. For this example, FB3.ENCRES
should be set to 1,000,000.
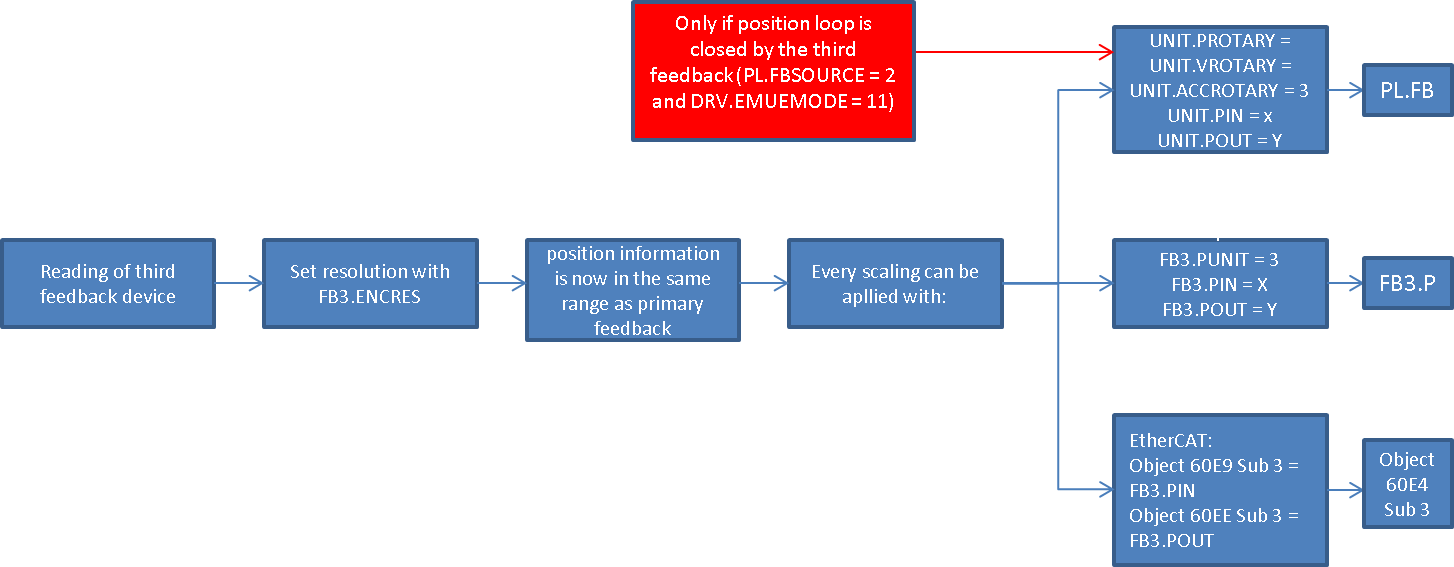
With this scaling and closing the position loop with the third feedback, the AKD knows how many counts per motor rev will be send from the feedback device.
-> with this information internal the position information for one rev is handled as a 32 bit value.
Now with UNIT.PROTARY = UNIT.VROTARY = UNIT.ACCROTARY = 3
And UNIT.PIN = x UNIT.POUT = Y every userscaling can be applied.
Scaling: