





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Sensorlose Steuerung für Asynchron Motoren mit S300-S700
Gültig für S300, S700
Einfacher sensorloser Betrieb von Asynchronmotoren (U/f Steuerung) mit S300 und S700. Detaillierte Beschreibung der Parametrierung von Asynchronmotoren finden Sie auf Seite "Betrieb von Asynchronmaschinen mit S300-S700".
In allen sensorlosen Betriebsarten wird die Ausgangsfrequenz auf 599 Hz begrenzt. Falls Ihre Applikation eine höhere Ausgangsfrequenz benötigt, kontaktieren Sie bitte unseren Support.
Einstellungen
| OPMODE | 0 oder 1 | Drehzahl Modus |
| MTYPE | 3 | Asynchronmotor |
| FBTYPE | 10 | sensorlos |
| EXTPOS | 0 | zusätzliche Geber abschalten |
| GEARMODE | 0 |
ASCII Befehle
| MFR | Nennfrequenz des Asynchronmotors (in Hz) |
| MUR | Nennspannung des Asynchronmotors (in V) |
| MVR | Nenngeschwindigkeit des Asynchronmotors (in min-1) |
| MCOSPHI | Leistungsfaktor cosφ des Asynchronmotors |
| VSTART | Ausgangsspannung bei f=0Hz als Bruchteil der Nennspannung MUR (1=100% MUR) |
| IQFILTK | Schlupf- Kompensation: Wichtungsfaktor (0…2; 1 = 100% des Nennschlupfs) |
| IQFILTTAU | Schlupf- Kompensation: Zeitkonstante des Tiefpasses (in ms) |
| SKIP1SP | Skip- Drehzahl 1 (in min-1) |
| SKIP1W | Skip- Breite 1 (in min-1) |
| SKIP2SP | Skip- Drehzahl 2 (in min-1) |
| SKIP2W | Skip- Breite 2 (in min-1) |
Die U/f Steuerung (Fig. 1) ist ein rein gesteuertes System ohne Lage- oder Drehzahlmessung.
Aus diesem Grund wird für den Drehzahl Istwert in der Inbetriebnahme Software (v_act im Oszilloskop, ASCII Befehl „V“) immer „0“ angezeigt.
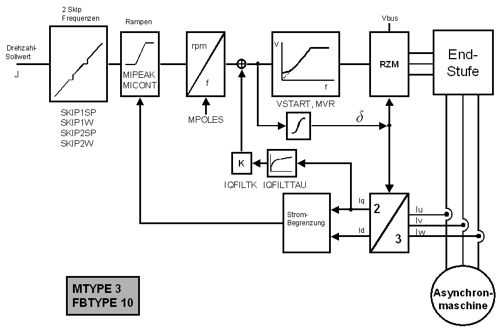
Fig. 1: U/f Steuerung im S300/S700
Konstante Spannung durch Frequenzsteuerung
|
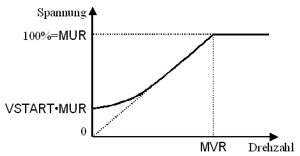
Um den magnetischen Fluss in der Maschine konstant zu halten, wird der Betrag der Ständerspannung proportional zur Ständerfrequenz verstellt. (Verhältnis U zu f konstant, U/f Steuerung). Wenn MUR und MVR richtig eingestellt sind, wird auch die Ausgangsspannung automatisch auf den richtigen Wert eingestellt auch wenn die Versorgungsspannung Schwankungen unterliegt. Der Ausgleich dieser Schwankungen funktioniert so lange, wie die Versorgungsspannung groß genug ist, damit die Asynchronmaschine die geforderte Drehzahl erreichen kann. Im Stillstand (f = 0) wird eine bestimmte Minimalspannung an die Maschine angelegt, die etwa 40% des Nennstroms erzeugt (VSTART ≈ 0.1) (Fig. 2) |
Fig. 2: Spannung als Funktion der Drehzahl |
Rampen
|
Die ASCII Befehle ACC und DEC legen die steilsten möglichen Rampen für die U/f Steuerung fest. Wenn der Betrag des Stroms den Nennstrom der Maschine (MICONT) übersteigt, werden die Rampen auf einen Wert begrenzt, der linear mit dem Motorstrom fällt, bis der Maximalstrom (MIPEAK) erreicht ist und die Maschine nicht weiter beschleunigen darf (ACC bzw. DEC = 0) (Fig. 3 und 4) |
Fig. 3: Maximale Rampenwerte als Funktion des Stroms |
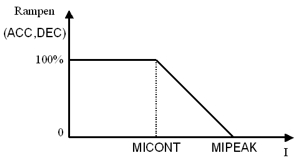
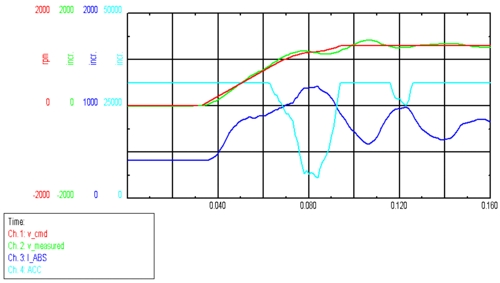
Fig4: Wirkung der Rampenbegrenzung (Drehzahlsollwert (rot), Drehzahlistwert (von der Lastmaschine gemessen, grün), Strom (blau), Beschleunigungsrampe (hellblau))
Schlupfkompensation
Der Motorstrom kann dazu genutzt werden, um den Schlupf zu kompensieren und damit die Drehzahl des Motors bei Belastung nahezu konstant zu halten.
Folgende Parameter müssen dazu korrekt eingestellt werden (siehe Motortypenschild):
MICONT, MPOLES, MVR, MCOSPHI, MFR
Der Verstärkungsfaktor IQFILTKwird zur Aktivierung und zur Feineinstellung des Schlupfkompensators genutzt. Hat IQFILTK den Wert 1, dann liefert der Schlupfkompensator an seinem Ausgang (ŝ) den Nennschlupf (sR) bei bei Nennbelastung. Für IQFILTK 0 ist der Schlupfkompensator abgeschaltet.
Skip Frequenzen
Um den Betrieb bei bestimmten Frequenzen zu vermeiden, bei denen Resonanzeffekte oder andere Störungen auftreten, können zwei Skip- Frequenzen über die dazu gehörenden Drehzahlen definiert werden. Die Bereiche die der Drehzahlsollwert nicht annehmen soll werden dabei jeweils über eine Drehzahl und eine Weite festgelegt (SKIP1SP, SKIP1W , SKIP2SP, SKIP2W , alle Werte in min-1). Ein Betrieb über längere Zeit in diesen Bereichen wird so vermieden.(Fig. 5)
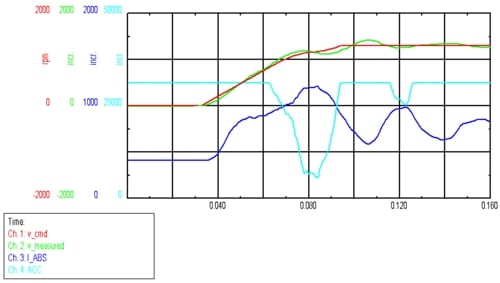
Fig. 5: Wirkung der Skip- Frequenzen (Drehzahlsollwert (rot), Drehzahlistwert (von der Lastmaschine gemessen, grün), Strom (blau), reale Frequenz der Ständerspannung (interne Einheiten, hellblau))
I²t Berücksichtigung
Beim sensorlosen Betrieb von Asynchronmotoren (U/f Steuerung) wird nur der berechnete Wert der I²t Belastung für den Motor (MI2T) berücksichtigt. Das Verhalten des Antriebs wird über die Parameter MICONT, MVR und VLIM bestimmt. VLIM legt auch hier die höchstzulässige Drehzahl fest.
Wenn die I²t Belastung des Motors über 80% steigt, wird die maximale Drehzahl herabgesetzt (Fig. 6 links). Wenn MI2T 100% erreicht, darf der Motor nur noch mit Nenndrehzahl (MVR) drehen (MI2T 100% = MICONT, zusammen mit MVR bedeutet das Nennleistung PN). Diese Leistung darf der Motor normalerweise dauerhaft abgeben. Falls der Strom weiterhin größer ist als MICONT und MI2T deshalb weiter ansteigt, wird die zulässige Drehzahl weitere reduziert (bis auf 0 bei MI2T 110%)
Diese Strombegrenzung kann nur funktionieren, wenn das Lastmoment wenigstens proportional mit der Drehzahl steigt (z. B. Reibung). Bei den meisten Lasten im U/f Betrieb sollte das der Fall sein. Bei Lüftern oder Pumpen steigt das Lastmoment sogar quadratisch mit der Drehzahl (Fig. 6 rechts Funktion 1 und 2).
Achtung ! Bei Lasten, die unabhängig von der Drehzahl ein konstantes Moment erzeugen (z.B. hängende Last, Fig. 6 rechts Funktion 3) funktioniert dies jedoch nicht.
Die I²t Belastung für den Regler (DI2T) wird zwar mitberechnet, hat aber keinen Einfluss auf den Höchstwert des Drehzahlsollwerts. Falls die angeschlossene Asynchronmaschine einen deutlich höheren Nennstrom (MICONT) als der Regler (DICONT) hat, wird DI2T bei Überlastung bis 115% ansteigen und dann einen Fehler (F15) auslösen. Falls diese Überlastung vermieden werden und auch hier eine Begrenzung der Drehzahl erfolgen soll, muss MICONT ggf. bis auf DICONT reduziert werden.
In dem anderen Fall, dass die angeschlossene Asynchronmaschine einen niedrigeren Nennstrom (MICONT) als der Regler (DICONT) hat, verhindert die oben beschriebene Drehzahlbegrenzung auch eine Überlastung des Reglers ohne weitere Anpassung der Parameter.
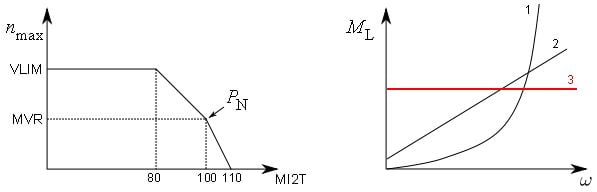
Fig. 6 Drehzahlbegrenzung in Anhängigkeit von der I²t Belastung (links) und verschiedene Lastmoment - Drehzahl - Kennlinien (rechts)
