





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Einstellen von Hall Gebern
Gültig für S300, S700
Test der Hallsignale
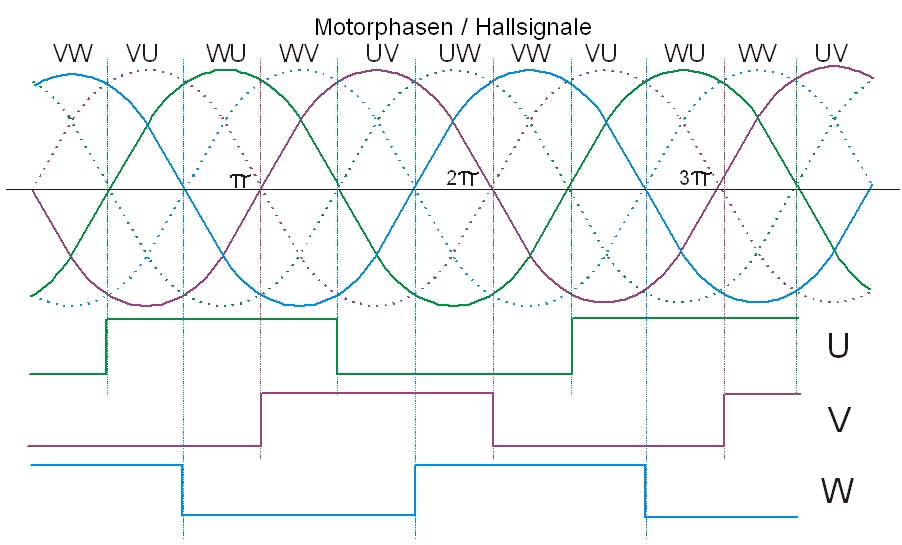
Oszilloskop in der Inbetriebnahme - Software
Nutzen Sie das Oszilloskop der Inbetriebnahme software. Stellen Sie den Kanal auf "benutzerdefiniert" ein und stellen Sie SR_HALL dar.
|
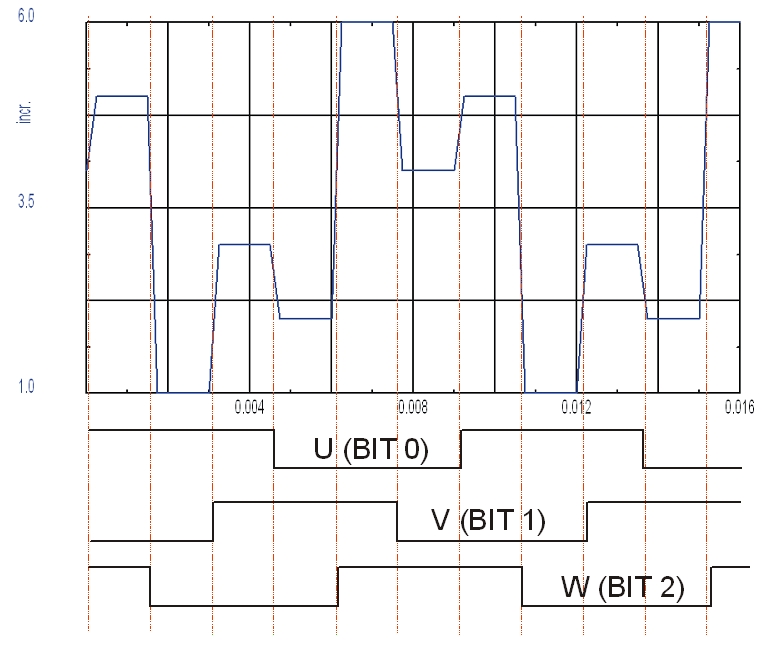
Rechtslauf, die Signale kommen in der Reihenfolge U - V - W |
Linkslauf, die Signale kommen in der Reihenfolge W - V - U |
 |
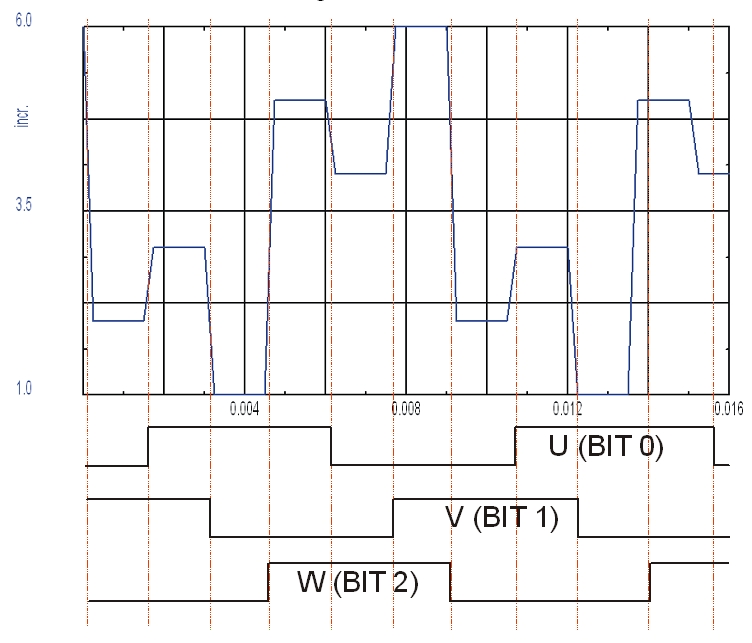 |
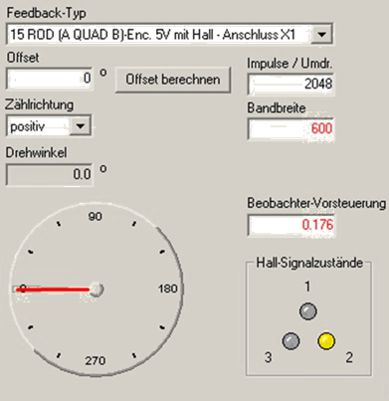
Feedback-Monitor in Inbetriebnahme - Software
| Feedback Typ 15, ComCoder (Hall Sensoren mit Inkrementalgeber) |
Feedback Typ 11, Hall Geber (nur Hall Sensoren) |
 |
 |
Softwaremäßiges Drehen der Hallsignale
Über den Parameter HALLDIR kann am S300/S700 der Drehsinn des Hall Geber geändert werden (siehe auch Drehrichtung - Variablen zur Einstellung). Nach einer Änderung muss MPHASE neu ermittelt werden.
Hinweis : Bei Änderungen von HALLDIR auch DIR anpassen: HALLDIR = 1 --> aus DIR 20 / 21 wird DIR 85 / 84.
Kontrolle / Justage des Feedback
| Aderfarbe | Blau | + | + | — | — | ||
| Braun | — | + | + | — | |||
| Violett | — | — | + | + | |||
| Leiter | U | + | + | — | — | ||
| V | — | + | + | — | |||
| W | — | — | + | + | |||
| Hallzustand | 1 (U) | L | ⇔ | H | H | ⇔ | L |
| 2 (V) | ⇔ | L | L | ⇔ | H | H | |
| 3 (W) | H | H | ⇔ | L | L | ⇔ |
Das Symbol ⇔ bedeutet, dass beim leichten Drehen der Achse eine Zustandsänderung sichtbar ist.
Inbetriebnahme unbekannter Hall - Motoren
Die ASCII-Kommandos und Werte müssen im Terminal eingegeben werden.
| ASCII | Wert | Funktion | |
| Ermittlung der Hallelement Drehrichtung HALLDIR |
MPOLES OPMODE T MPHASE |
0 2 0.5 x x = (30, 60, …, 330) |
Anzahl der Motorpole = 0 Drehmoment digital Konstanter Stromsollwert (z.B. hier: 0.5 A) Phasenlage des Feedback-Systems? zum Motor Phasenoffset schrittweise erhöhen und Hallsignale mit der Variablen M SR_HALL überprüfen. Beispiel : MPHASE 30 Reihenfolge der Hallelemente: 1,5,4,6,2,3,1 positive Drehrichtung (HALLDIR 0) HALLDIR einstellen: |
| Ermittlung der Drehrichtung des Lagegebers PFB |
PFB | Drehen Sie die Motorwelle im Uhrzeigersinn. Beobachten Sie den Positionswert mit dem Kommando PFB. Falls PFB nicht ansteigt sondern absinkt, ist mit dem ASCII – Befehl DIR das Signal zu invertieren. Die DIR Variable definiert die Zählrichtung der Rückführeinheit. |
|
| Ermittlung des Kommutierungswinkels |
MPHASE MSG PFB |
90 2 |
Wichtig: Multiplizieren Sie den Winkel mit der Anzahl der Polpaare, z.B. 153.237 x 3 = 459.711. Subtrahieren Sie 360 bis das Resultat ein Wert zwischen 0 und 359 ist. Beispiel: |
| Feineinstellung MPHASE |
ZERO | Feineinstellung von MPHASE |
Regelung im kleinen Drehzahlbereich für Feedback Type 11, Hall ONLY
Der Servoverstärker erhält vom Hall Feedback alle 60° (elektrisch) eine neue Positionsinformation.
Bei z.B. einem 6 poligen Motor gilt: 1 mechanische Umdrehung = 3 elektrische Umdrehungen.
Das bedeutet, alle 20° Motorbewegung erhält der Servoverstärker eine neue Hall Position, also 0°, 20°, 40°, 60°,…, 340°.
Diese Positionsinformation ist nicht ausreichend für eine stetige Regelung im unteren Drehzahlbereich. Daher wenden S300 und S700 Servoverstärker abhängig von der Istdrehzahl zwei Regelungsmethoden an:
- unterhalb der Drehzahl SLJSWITCH ist eine sensorlose Regelung aktiv,
- oberhalb der Drehzahl SLJSWITCH benutzt der Regler die Positionsinformation gewonnen aus den Hallsegmenten (Kommutierung, Drehzahl, Position).
Folgende Regelungskonzepte für den Drehzahlbereich unterhalb von SLJSWITCH sind im S300 / S700 Servoverstärker integriert:
- Stepper Modus, U/F Betrieb: Der Servoverstärker arbeitet wie ein Stepper Drive, U/F Kennlinie. Diese Methode wird bei SLMODE 1 aktiviert.
- HF Modus (High frequency injection): Diese Methode wird bei SLMODE 0 aktiviert. Sie existiert nur noch aus Kompatibilitätsgründen und wird nicht mehr weiter entwickelt.
ASCII Parameter
- SLMODE: Mit diesem Parameter wird Stepper Mode (U/F) oder HF Funktion ausgewählt. Diese Funktion ist nur für den kleinen Drehzahlbereich relevant!
- SLMODE 0: Regelungskonzept 1 (HF Funktion) Freigabe. TEN = 0, sonst erzeugt der Motor kein Drehmoment!
- SLMODE 1: Regelungskonzept 2 (U/F) Freigabe. Dieses Konzept ist empfohlen.
- TEN: wird intern von der Firmware gesteuert, abhängig von dem aktuellen Drehzahl und SLMODE.
- TEN 0: nur beim SLMODE 0.
- V < SLJSWITCH HF aktiv.
- V > SLJSWITCH Hall Information aktiv.
- TEN 1: bei V < SLJSWITCH. U/F aktiv.
- TEN 2: bei V > SLJSWITCH. Hall Information aktiv.
- TEN 0: nur beim SLMODE 0.
- SLJSWITCH: Drehzahl Schwellwert für kleinen Drehzahlbereich. Default 500 U/min.
- SLTSWITCH: Übergangszeit von kleinem Drehzahlbereich zum normalen Drehzahlbereich. Default 200 ms. Der Motor dreht mit SLJSWITCH weiter, bevor der Normalbetrieb (Regelung mit Hall Information) aktiviert wird.
- DRVCNFG4 Bit11: verbesserte Berechnung der aktuellen Geschwindigkeit in Hall Only Modus. Diese Funktion ist zurzeit defaultmässig aus Kompatibilitätsgründen nicht aktiv . Sie sollte die verbesserte Berechnung jedoch bei neuen „Hall Only“ Applikationen benutzen.
OPMODE 2/3 Drehmoment Vorgabe
Drehmoment Vorgabe (analog oder digital) funktionieren nicht bei Hall ONLY. Selbst ohne Stromvorgabe erzeugt der Motor Drehmoment (bei aktiver ENDSTUFE), da im kleinen Drehzahlbereich U/F oder HF Funktion aktiv ist!
Kommutierungsfindung ZERO, MPHASE
MPHASE wird mit der ZERO Funktion in OPMODE 2 ermittelt, wie bei allen anderen Gebern. Da Hall ONLY nur einen Impuls alle 60° elektrisch sendet, ist MPHASE bis auf ±30° elektrisch genau.
Der Servoverstärker macht die Kommutierung im kleinen Drehzahlbereich ohne Geberinformation „Sensorless“ und nutzt im Drehzahlbereich oberhalb SLJSWITCH MPHASE & Gebersignale für die Kommutierung.
Schnelle Inbetriebnahme
DRVCNFG4 bit11= 1 SLMODE 1 //TEN wird bei SLMODE 1 automatisch gesteuert. Bei SLMODE 0 müsste TEN auf 0 stehen! SLACCMAX 100 rpm/s //kann im Betrieb erhöht werden. ACC=DEC=DECDIS=DECSTOP=500 rpm/s //kann im Betrieb erhöht werden. MRESBW 50 //zwischen 30 und 100Back to top
