





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >4 Quadranten Betrieb
Ein Servosystem, das zur Kontrolle von Geschwindigkeit und von Drehmoment in den positiven und negativen Richtungen fähig ist, wird 4 Quadranten System genannt (siehe Diagramm unten).
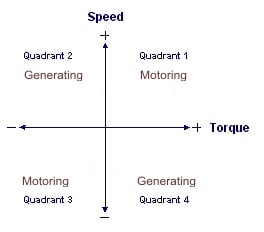
Der Betrieb in den Quadranten 1 und 3 wird "motorischer" Betrieb genannt, was bedeutet, dass Geschwindigkeit und Drehmoment identische Richtung haben (beide positiv oder beide negativ). Dies ist der Fall, wenn ein Antrieb eine Last antreibt und Energie vom Motor verbraucht wird.
Der Betrieb in den Quadranten 2 und 4 wird "generatorisch" genannt, was bedeutet, dass Geschwindigkeit und Drehmoment entgegengesetzte Richtungen haben (eine negativ und die andere positiv). Dies ist der Fall, wenn der Motor die Last bremst, der Motor generiert dann elektrische Energie. Diese Energie wird entweder in das Netz zurückgespeist oder in einem Bremswiderstand in thermische Energie umgewandelt oder in Kondensatoren gespeichert (siehe KCM Kondensatormodul).

Ein reibungsfreies System annehmend, zeigt das Bild oben ein typisches Bewegungsprofil und sein Verhältnis zum Motor Drehmoment dar. Jedes Segment des Profils kann einem spezifischen Quadranten zugeordnet werden.
Das erste Segment zeigt die Beschleunigung des Motors mit gleichsinniger Geschwindigkeit und Drehmoment (beide positiv). Das System arbeitet im 1. Quadranten.
Im Segment 2 wird der Motor gebremst. Die Geschwindigkeit ist weiter piositiv. Das Drehmoment ist jedoch negativ, um den Motor zum Stillstand zu bringen. Dies entspricht dem Betrieb im 2. Quadranten.
Segmente 3 und 4 gelten entsprechend für die andere Drehrichtung und beschreiben den Betrieb in den Quadranten 3 und 4.
