Bei der Auswahl eines linearen Servomotors gibt es mehrere anwendungsspezifische Aspekte zu berücksichtigen. Dazu gehören unter anderem physikalische Größen wie die erforderliche Drehzahl oder die Kraft sowie das geforderte Bewegungsprofil und weitere Umgebungsfaktoren. Dies bedeutet, dass die ausgewählte Linearmotorlösung sowohl die Geschwindigkeits- und Kraftanforderungen erfüllen muss auch als auch in den vorhandenen Bauraum integriert werden und die gegebenen Umgebungsbedingungen unterstützen muss.
Ein linearer Servomotor ist Teil eines Gesamtmechanismus, der für die Bewegung einer Last sorgt – um sie zu bearbeiten, anzuheben, zu untersuchen und vieles mehr. Der Linearmotor ist der Antrieb, der die erforderliche Kraft und Geschwindigkeit (erforderlicher Lastpunkt) liefert, um eine vorgegebene Funktion auszuführen. Am schnellsten und zuverlässigsten lassen sich diese Anforderungen mittels eines Auslegungstools ermitteln, das die vom Motor benötigten Lastpunkte berechnet und Informationen über die Last, die Übertragungselemente und das Bewegungsprofil analysiert, um einen Motor aus der Datenbank auszuwählen, der den Parametern entspricht. Anhand der gegebenen Lastpunkte ermittelt das Auslegungstool eine optimale Lösung und grenzt die Motorenauswahl auf Grundlage der erforderlichen Kraft, der Geschwindigkeit, des Trägheitsverhältnisses und den Margen ein, die aus den Motornennwerten ermittelt wurden.

Die physikalische Größe eines Linearmotors wird hauptsächlich durch seine Fähigkeit zur kontinuierlichen Krafterzeugung bestimmt. Die unterschiedlichsten Linearmotoransätze bieten die Möglichkeit, entweder bei fixierter Magnetbahn den Primärteil mit Spulen zu bewegen oder bei fixiertem Primärteil den Stator samt Magnetbahn zu bewegen. Linearmotoren sind in Bauweisen mit Eisenkern oder eisenlos (U-förmig) erhältlich.
Die Bauweise mit Eisenkern eignet sich mit ihrer Fähigkeit zur Erzeugung hoher Flüsse dank des Eisenrückschlusses im Primärteil ideal zur Erzeugung großer Schubkräfte. Motoren mit Eisenkern werden auf flachen Magnetbahnen bewegt und neigen aufgrund von Cogging zu Kraftwelligkeit. Eine eisenlose Bauweise mit geringerer Masse eignet sich für schnelles Beschleunigen. Eisenlose Motoren werden in einer u-förmigen Bauweise mit Magneten auf beiden Seiten des Kolbens ohne jegliches Cogging betrieben.
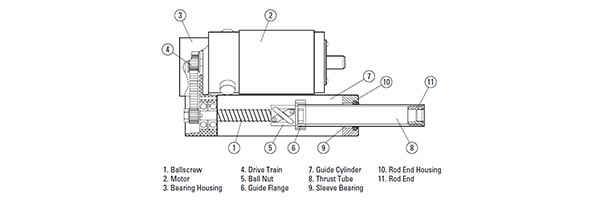
Lineare Servomotorsysteme werden in unterschiedlichen Grundausführungen vertrieben – als Bausatz mit Motorwicklung und Magnetbahn für eine optimale Integration in eine Kundenapplikation oder in Form von vorgefertigten Linearaktuatoren oder Verfahrtischen. Als Bausatz hat ein Maschinenkonstrukteur volle Kontrolle und Flexibilität, wie der Linearmotor innerhalb der Maschine integriert wird. Der Konstrukteur muss die für den Einbau des Motors erforderliche Mechanik, die Auswahl und Anordnung der Rückführung, das Kabelmanagement und die Lagerauswahl beachten. In einem vorgefertigten Linearaktuator wird sämtliche Mechanik vorbestimmt, sodass dieser auf schnelle Weise in die Maschine integriert werden kann. Normalerweise verfügen vorgefertigte Linearaktuatoren über eine begrenzte Auswahl an Hublängen, während der Linearmotor als Bausatz deutlich mehr Flexibilität bietet.
Bei Linearmotoren sind die gleichen Umwelt- und Temperaturaspekte zu beachten wie bei allen anderen Servomotoren auch. Bei linearen Servomotoren muss die mögliche Ansammlung von Metall oder anderen Partikeln auf der Magnetbahn beachtet werden, da sie zu Schäden an Primär- oder Sekundärteilen führen kann. In Maschinen sorgt ein Faltenbalg oder eine vergleichbare Abdeckung für einen erhöhten Schutz der Magneten und des Luftspalts vor der Ansammlung unerwünschter Verunreinigungen.
Durch Beachtung der Platzanforderungen, der Umweltbedingungen sowie der Drehzahl- und Kraftanforderungen des Motors lässt sich der richtige Linearmotor oder Linearaktuator einfacher auswählen.