Sono molti gli aspetti da considerare quando si deve scegliere un attuatore lineare ad azionamento diretto per un'applicazione specifica, ad esempio velocità o forza necessarie, il profilo di movimento, l'alloggiamento fisico disponibile, fattori ambientali. La soluzione scelta per l'attuatore dovrà quindi garantire i requisiti di forza di carico e velocità, adattarsi allo spazio disponibile ed offrire prestazioni in base alle condizioni ambientali cui è soggetta l'applicazione.
Un attuatore lineare fa parte di un meccanismo globale che fornisce il movimento ad un carico, per spostarlo, lavorarlo, sollevarlo, ispezionarlo, ecc. Il motore lineare è il muscolo dell'attuatore lineare che eroga la forza e la velocità necessarie (punto di carico richiesto) per svolgere una determinata funzione. Il modo più rapido e affidabile per identificare queste esigenze è avvalersi di uno strumento di dimensionamento del motore che calcoli i punti di carico richiesti dal motore e analizzi dati sul carico, sugli elementi di trasmissione e sul profilo di movimento per selezionare dal database un motore che corrisponda ai parametri. Man mano che vengono identificati i punti di carico iniziali, lo strumento cerca la soluzione ottimale e restringe la scelta sulla base della velocità e dell'inerzia richieste e dei relativi margini acquisiti dalle potenze nominali dei motori.

La dimensione fisica di un motore lineare è determinata soprattutto dalla sua capacità di produrre forza continua. Tutti i modelli di motori lineari hanno la possibilità di spostare l'avvolgimento con la traccia magnetica fissa o spostarla mentre l'avvolgimento è fisso. I motori lineari sono disponibili in design con nucleo in ferro e ironless (canale a U).
Un design con nucleo in ferro, con la sua elevata capacità di produzione di flusso consentita dal ferro posteriore nell'avvolgimento, è ideale per ottenere forze di spinta più elevate. I motori con nucleo in ferro funzionano su un percorso magnetico piatto e tendono ad avere un certo disturbo di forza a causa del cogging. Un design ironless con la sua costruzione a massa inferiore è adatto ad accelerazioni rapide. I motori ironless funzionano con un design a canale a U con magneti su entrambi i lati dell'avvolgimento e non presentano cogging.
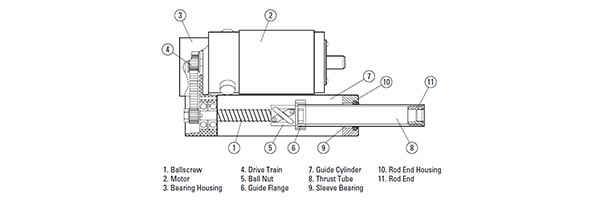
Gli attuatori lineari a trasmissione diretta sono venduti in due configurazioni di base: come bobina del motore e set di percorsi magnetici progettati per essere integrati nel meccanismo di applicazione o come attuatori lineari o stadi precostruiti. Con il kit, il progettista della macchina ha il controllo completo sulle modalità con cui il motore lineare si integrerà all'interno della macchina. Il progettista deve tenere conto della meccanica necessaria per montare il motore, della selezione e del posizionamento della retroazione, della gestione dei cavi e della selezione dei cuscinetti. In un attuatore lineare precostruito, tutta la meccanica per supportare il motore lineare è predeterminata in modo tale che l'attuatore possa essere rapidamente integrato nella macchina. In genere, gli attuatori lineari precostruiti hanno una selezione limitata di forze e lunghezze di corsa disponibili, mentre l'approccio del kit offre una flessibilità notevolmente maggiore.
I motori lineari tengono conto degli stessi aspetti ambientali e di temperatura di qualsiasi servomotore. Una considerazione importante di un servomotore lineare è l'accumulo potenziale di metallo o di altri particolati sul percorso del magnete che può causare potenziali danni all'avvolgimento o ai magneti. Nelle applicazioni di lavorazione, un soffietto o una copertura simile può aiutare a proteggere i magneti e l'intercapedine d’aria dall'accumulo di detriti indesiderati.
Un'attenta considerazione dei requisiti di spazio del motore e delle condizioni ambientali, oltre ai requisiti di velocità e forza, consentirà una corretta selezione dell'attuatore lineare ad azionamento diretto adatto.