Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Tuning - Rotatorische Direktantriebe
Gültig für S400, S600
Allgemeines
Motoren, die aufgrund Ihrer Bauart besondere elektrische oder physikalische Eigenschaften haben, benötigen spezielle Einstellungen, insbesondere an Parametern, die bei anderen Anwendung nicht so häufig genutzt werden.
Diese Applikationsschrift soll dem Anwender auf diese besondere Handhabung der Einstellungen hinweisen. Eine konkrete Aussage welche Werte notwendig sind, kann nicht gemacht werden. Es wird der Weg beschrieben, in welchen Schritten vorzugehen ist, um diese Werte zu ermitteln.
Aufgrund verschiedener Berechnungsgrundlagen können Motoren verschiedener Baureihen oder Herstellern erheblich unterschiedliche Einstellungen benötigen. Ebenso ist es notwendig, einen im lastlosen Zustand getunten Motor in der späteren Anwendung nochmals anzupassen.
Die Optimierung wird hier am Beispiel eines Direktantriebes aufgezeigt:
Sonderfall: Motor steht auf einem Ständer der einer Torsion zulässt.
Tuning
Feedback Test
 Das Feedback wird vor dem ENABELN ( Regler ohne Leistungsversorgung) über das Fenster Monitor getestet. Eine Rechtsdrehung der Motorwelle muss einer Rechtsdrehung in der Anzeige entsprechen, dabei muss auch die Position aufsteigend zählen.
Das Feedback wird vor dem ENABELN ( Regler ohne Leistungsversorgung) über das Fenster Monitor getestet. Eine Rechtsdrehung der Motorwelle muss einer Rechtsdrehung in der Anzeige entsprechen, dabei muss auch die Position aufsteigend zählen.
Stromregler
Das Einstellen des Stromreglers entspricht dem eines „normalen“ Motors. Eine Möglichkeit ist, den ASCII Befehl CTUNE zu benutzen. Alternativ kann der Wert ausgetestet werden.
Der KP-Wert wird von 0.5 in 0.5-Schritten bei ENABELTEN Regler (OPMODE 0) nach oben gesetzt, bis der Motor pfeifende Geräusche macht. Danach wird der Wert um ca. 20% reduziert.
TIP: Der Peakstrom sollte bei Inbetriebnahmen herabgesetzt werden, um die Folgen von Fehlverhalten zu reduzieren. Dieser Wert kann dann stufenweise angehoben werden, in Abhängigkeit der einzelnen Tuningmaßnahmen. Es ist aber zu beachten, dass Ipeak nicht zu klein gewählt wird, so dass das zu überwindende Reibmoment sicher überschritten wird.
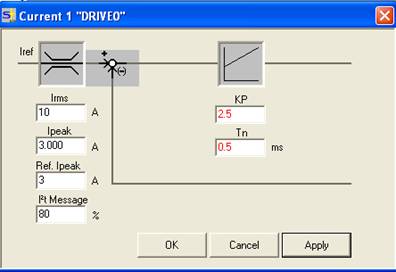
Bild 1: Bidschirmseite Stromregler (Drive.exe, S600)
Observer
Um die gewünschte Verstärkung im Drehzahlregler zu ermöglichen, war es bei dieser Inbetriebnahme notwendig, den Drehzahlbeobachter (OBSERVER) auf OFF zu stellen. Dadurch wird die Einstellung T-TACHO im Drehzahlregler zugänglich.
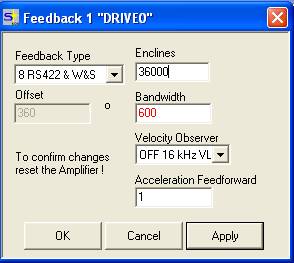
Bild 2: Bidschirmseite Feedback (Drive.exe, S600)
Drehzahlregler
Im Falle der hier beschriebenen Inbetriebnahme waren einige Optimierungen notwendig. Ziel ist, eine Erhöhung des KPs im Drehzahlregler um eine steife Achse zu erhalten.
Durch die Anhebung von PID-T2 auf 30 (vergleichsweise hoher Wert) und T-TACHO von 0.4 auf 2 werden die Torsionsschwingungen der Säule gefiltert. In der Folge kann KP von 70 auf 600 heraufgesetzt werden.
Die sehr hohen KP-Werte im Drehzahlregler sind typisch für Motoren für rotatorische Direktantriebe.
Der Wert KP darf nur in ca. 20% Schritten erhöht werden (Bsp. 1 auf 1,2 oder 100 auf 120) bis zur Schwingungsgrenze. Danach sollte der Wert wieder um ca. 10% reduziert werden. Ein Senken des PID-T2 Wertes darf im Gegenzug, bei hohen KP Werten nur in kleinen Schritten erfolgen !
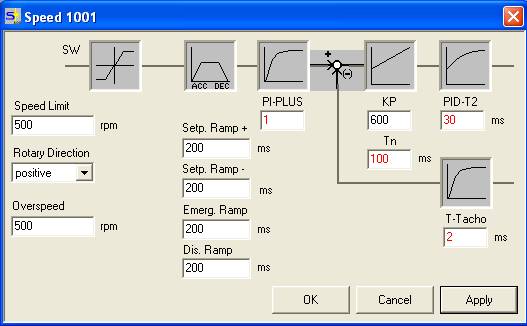
Bild 3: Bidschirmseite Drehzahlregler (Drive.exe, S600)
Anpassung an die Masse
Der Wert KP muss nach einer deutlichen Änderung der zu bewegenden Masse angepasst werden.
Messungen zum Tuning
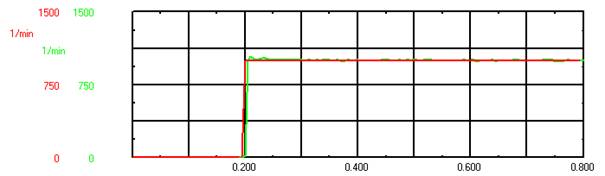
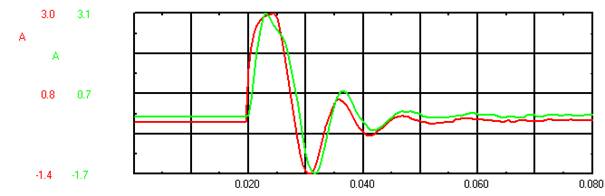
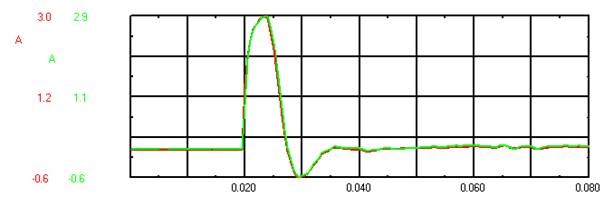
Strom I_soll und I_ist . 10ms Zeitbasis. Antwort auf Drehzahlsprung von 0 auf 1000.
Schlecht abgeglichener Stromregler:
Gut abgeglichener Stromregler:
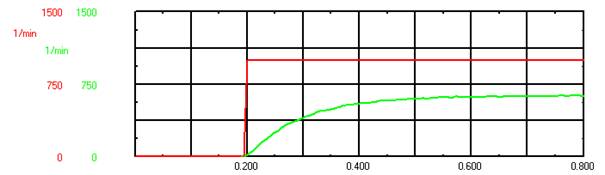
Drehzahl n_soll und n_ist Werte. 100ms Zeitbasis. Antwort auf Drehzahlsprung von 0 auf 1000
Schlecht abgeglichener Drehzahlregler:
Gut abgeglichener Drehzahlregler: