





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Bode Plot Funktionen
Gültig für S300, S700
Allgemeines
Erzeugung von Bode Plots mit dem S300 / S700 für Stromregler, Drehzahlregler und Lageregler. Ziel ist die Bewertung des dynamischen Verhaltens des Antriebs und die sichere und schnelle Bestimmung der optimalen Reglerparameter.
Um das Übertragungsverhalten und die Dynamik des Antriebs zu ermitteln und um die Regelkreise optimal zu parametrieren, bietet der Servoverstärker für jede Ebene der Regelkaskade (Strom-, Drehzahl- und Lageregler) eine eigene softwaremäßige Bode Plot Funktionalität. Die Bedienung ist bei allen drei Messfunktionen ähnlich, es gibt jedoch auch Unterschiede.
Stromregler: CBW (ASCII CMD), Current BandWidth
Die Einstellung des Stromregelkreises hängt im Wesentlichen von der Motorinduktivität und der Totzeit des Reglers ab. Für alle AKM Servomotoren existieren optimierte Parametersätze. Eine weitere Anpassung ist meist nicht notwendig.
Für Motoren anderer Hersteller gibt es mit dem ASCII Befehl „CBW“ die Möglichkeit auch für den Stromregelkreis ein Bode Plot zu erzeugen. Mit der Bode Plot Funktion für den Stromregelkreis ist es unter Umständen möglich, den Motor zu beschädigen. Aus diesem Grund wird diese Funktion nicht öffentlich dokumentiert und sie sollte nur von erfahrenen Benutzern eingesetzt werden.
 Bild 1: Beginn des Strom Bode Plots im Hyperterminal mit Kopfzeile und Ergebnis. |
 Bild 2: Ende des Strom Bode Plots Phasenreserve: 70,5° (rot), 90° Bandbreite: 2,7kHz (grün) |
Vorgehensweise
- Für das Strom Bode Plot muss sich der Regler in „OPMODE 2“ (Strom digital) befinden.
- Zum Testen der Reglerparameter kann der Motor festgebremst werden und die Sprungantwort eines kleinen Stromsprungs (T 0.1) mit dem Oszilloskop gemessen werden. Falls der Regler in Schwingungen gerät, muss ggf. KP des Stromreglers (MLGQ) herabgesetzt werden, bevor das Bode Plot durchgeführt wird.
- DriveGUI: trennen (Disconnect), Hyperterminal starten. Wenn notwendig mit PROMPT 133 die Prüfsumme abschalten.
- MSG 2 lässt die Ergebnisse sofort anzeigen (Empfohlener Modus). Ansonsten kann das Ergebnis nach Beendigung des Messvorgangs mit GET angezeigt werden.
- CBW startet das Strom Bode Plot.
- Anzeige im Hyperterminal (Bild 1): Fünf jeweils durch Komma getrennte Spalten. Erste Spalte: Frequenz in Hz. Dann je zwei Spalten für den geschlossenen und für den offenen Regelkreis in denen der Phasenwinkel in ° und der Amplitude in dB angezeigt werden. Zu Beginn wird eine Kopfzeile mit einem I für den Stromregelkreis und den Bezeichnungen der Spalten ausgegeben.
- Der Vorgang kann jederzeit mit den Kommandos STOP, DIS oder K abgebrochen werden. Dies führt zum sofortigen disablen des Antriebs.
Um eine Beschädigung des Motors zu vermeiden, muss ein Abbruch sofort erfolgen, wenn die Amplitude dauerhaft über 7dB ansteigt. In diesem Fall erzeugt der Stromregler den 5 fachen Sollstrom, das ist ein maximaler Strom, der das dreifache des für den Motor zugelassenen Dauerstroms I0 (MICONT) betragen kann. Meist ist unter diesen Umständen die Proportionalverstärkung (MLGQ) deutlich zu groß. - Falls eine grafische Anzeige gewünscht wird, kann das Ergebnis im Bode Plot Modus des DriveGUI durch drücken des „Refresh“ Buttons geladen und angezeigt werden.
Ergebnis
Abhängig von der eingestellten Schaltfrequenz bzw. Stromupdate (DPWM) wird das Bode Plot für unterschiedliche Frequenzbereiche durchgeführt. Die Frequenz zu Beginn ist in jedem Fall 100Hz. Für 8 kHz Schaltfrequenz und 16 kHz Stromupdate (DPWM 0) beträgt die maximale Frequenz des Bode Plots 4200 Hz und für 16/32kHz (DPWM 1) 8000 Hz, hier dauert die Messung entsprechend länger. Diese Bereiche sind nicht veränderbar.
Neben der Möglichkeit der grafischen Anzeige mit dem DriveGUI (s.o.) ist es schon in der tabellarischen Anzeige möglich, die wichtigen Kennwerte abzulesen (Bild 2). Die Bandbreite des Stromregelkreises ist ein Maß für die Dynamik des Antriebs. Dieser Frequenzwert wird dort abgelesen, wo entweder
- der Phasengang des geschlossenen Regelkreises die -90° Linie schneidet (grüne Markierung: 2,7kHz).
- oder wo der Amplitudengang -3 dB schneidet
Der kleinere Wert beschreibt die Bandbreite. Amplituden- und Phasenreserve werden am offenen Regelkreis abgelesen. In Bild 2 ist die Frequenz, an der die Phasenreserve sichtbar wird, rot markiert (180°-109,5°=79,5°).
Parameter
Das Strom Bode Plot kann mit einem Parameter aufgerufen werden (CBW {Imax}). Dieser legt den Maximalwert für den sinusförmigen Teil des eingeprägten Stroms fest (in Arms).
Der Default-Wert für diesen Parameter ist abhängig vom Ausgangsstrom des Reglers und vom Nennstrom des angeschlossenen Motors. (Imax_default = Min {0,4 * I0Motor;0,2 * I0Regler}).
Der Spitzenwert des eingeprägten Stroms kann bis zu einem Maximalwert (Imax_lim = Min{0,4 * I0Motor;0,4 * I0Regler;3A}) erhöht werden. Im Normalfall ist die Standard-Amplitudenhöhe des Messsignals vollkommen ausreichend, so dass eine Erhöhung nicht notwendig ist. Eine Verkleinerung dieses Werts kann sinnvoll sein, wenn die Strombelastung des Motors begrenzt werden soll.
Drehzahlregler: VBW (ASCII CMD), Velocity Band Width
Die Bode Plot Funktion für den Drehzahlregelkreis ist die wichtigste Bode Plot-Funktion des Servoverstärkers. Sie kann von einem Hyperterminal aus mit dem Befehl VBW oder innerhalb der Inbetriebnahme Software DriveGUI gestartet werden.
Die Parametrierung des Drehzahlregelkreises hängt von einer Vielzahl von Faktoren ab und ist im Allgemeinen die anspruchsvollste Aufgabe bei der Einstellung des Reglers. Mechanische Resonanzen sind in dieser Ebene normalerweise deutlich spür- bzw. sichtbar. Aus diesem Grund bietet die ServoStar Software mehrere unterschiedliche Beobachter und Filter an, die großen Einfluss auf die Dynamik des Reglers im Drehzahlbereich haben. Mit dem Bode Plot-Werkzeug lassen sich die Auswirkungen dieser Elemente sehr gut messen und visualisieren.
Achtung ! Während des Messvorgangs befindet sich die Motorwelle dauernd in einer Oszillationsbewegung. Es darf dabei nicht außer Acht gelassen werden, dass die angeschlossene Mechanik dadurch zu Schwingungen angeregt werden kann. Sehr starke mechanische Resonanzen können auf diese Weise zu Fehlern führen, die das unkontrollierte Auslaufen des Motors zur Folge haben.
Vorgehensweise
Für das Drehzahl Bode Plot muss sich der Regler in OPMODE 0 (Drehzahl digital) befinden.
Starten aus dem DriveGUI
„Bode Plot“ im Verzeichnisbaum anwählen und oben auf der Seite „Bode Plot“ anklicken, um den Messvorgang zu starten. In der Grundeinstellung nimmt der Regler zwanzig Messwerte zwischen den Frequenzen 20 und 500 Hz auf. Dieser Messbereich kann in dem Untermenü „Parameters...“ auf derselben Seite beliebig verändert werden. Besonders bei Resonanzen, die sehr schmalbandig im oberen Messbereich auftreten, ist es empfehlenswert, die Anzahl der Messpunkte (Steps) zu erhöhen, um den Effekt genau abzubilden. Dies verlängert die Zeit des Messvorgangs entsprechend.
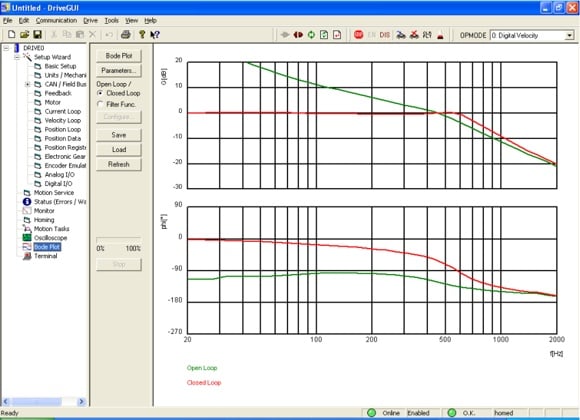
Bild 3: Drehzahl Bode Plot im DriveGUI offener Regelkreis (grün), und geschlossener Regelkreis (rot)
Am Ende des Messvorgangs wird das Ergebnis für den offenen (grün) und den geschlossenen Regelkreis (rot) in dem Bode Diagramm angezeigt (Bild 3). Der Messvorgang kann auch vor seinem Abschluss jederzeit durch drücken des „Stop“ Buttons beendet werden. In diesem Fall wird das Ergebnis bis zu dem Zeitpunkt der Unterbrechung angezeigt.
Aus diesem Fenster können Messungen mit den Befehlen „Save“ und „Load“ gespeichert bzw. geladen werden. Durch drücken des „Refresh“ Buttons wird der letzte Speicherinhalt des Reglers wieder auf den Bildschirm gebracht. Das Oszilloskop benutzt allerdings denselben Speicher. Wenn ein Bild mit dem Oszilloskop aufgenommen wurde bleibt die Anzeige leer.
Starten aus dem Hyperterminal
Wie bei dem Strom Bode Plot lässt MSG 2 die Ergebnisse sofort anzeigen (Empfohlener Modus). Sonst kann das Ergebnis nach Beendigung des Messvorgangs mit GET angezeigt werden. Der Befehl VBW startet das Drehzahl Bode Plot. In der Grundeinstellung nimmt der Regler anders als im GUI hier dreißig Werte zwischen 20 und 800 Hz auf.
Angezeigt werden fünf durch Komma getrennte Spalten. In der ersten Spalte die Frequenz in Hz. Dann je zwei Spalten für den geschlossenen und für den offenen Regelkreis in denen der Phasenwinkel in ° und die Amplitude in dB angezeigt werden. Zu Beginn wird eine Kopfzeile mit einem V für den Drehzahlregelkreis (Velocity) und den Bezeichnungen der Spalten ausgegeben.
Wenn andere Messstützpunkte gewünscht sind, werden diese aus dem Hyperterminal als Parameter mit dem VBW Befehl übergeben (VBW {fmin} {fmax} {samples} {switch}). Diese Parameter bezeichnen die zu Beginn der Messung, die maximale Frequenz und die Anzahl der Messstützpunkte. Mit dem letzten Parameter können alle Filterfunktionen abgeschaltet werden.
Wenn das Ergebnis nachträglich im DriveGUI abgebildet werden soll, geschieht dies durch drücken des „Refresh“ Buttons.
Filter Func.
Zusätzlich zu der Möglichkeit, ein Bode Plot des bestehenden Systems zu erstellen, ist es in der Inbetriebnahme Software DriveGUI möglich, mit der Option „Filter Func.“ die Auswirkungen eines der Filter aus dem Drehzahlregelkreis auf den aufgeschnittenen Regelkreis vorherzusagen, ohne direkt ein Bode Plot erzeugen zu müssen. Bild 4 zeigt dies am Beispiel eines BiQuad? Filters. Die grüne Kurve zeigt weiterhin den (gemessenen) offenen Regelkreis ohne den zusätzlichen Filter. Die rote Kurve zeigt hier jetzt nicht mehr den geschlossenen Regelkreis sondern die Übertragungsfunktion des Filters allein, so wie es durch die Parameter aus dem Untermenü vorgegeben wurde. Die blaue Kurve zeigt den resultierenden aufgeschnittenen Regelkreis mit diesem zusätzlichen Filter.

Bild 4: Drehzahl Bode Plot im DriveGUI mit Filter Funktion: offener Regelkreis (grün), Filter (rot) und resultierender offener Regelkreis (rot) mit Filter
Es empfiehlt sich vor einer solchen Berechnung ein Bode Plot ganz ohne Filter im Drehzahlregelkreis zu erstellen, da sonst die ermittelten Filtereinstellungen nicht mehr ohne weiteres realisierbar sind. Bei der Messung ohne Filter muss die Proportionalverstärkung GV meist reduziert werden! Die Amplitude des anregenden Signals ist umgekehrt proportional zu GV!
Lageregler: PBW (ASCII CMD), Position BandWidth
Es ist für den äußeren (Lage-) Regelkreis des Servoreglers ebenfalls möglich, ein Bode Plot zu erstellen. Dieses berücksichtigt alle im Lageregelkreis aktiven Elemente einschließlich der Vorsteuerungen, sofern sie intern im Regler berechnet werden.
Zur Stabilitätsuntersuchung müssen die Vorsteuerungen abgeschaltet sein.
Zuvor sollte der Drehzahlregelkreis sorgfältig eingestellt werden, so dass keine Resonanz-überhöhungen mehr entstehen. Diese würden sonst im Lageregelkreis zu stark auswirken.
In der Grundeinstellung wird der Motorläufer maximal um etwa 3°elektrisch ausgelenkt. Das Programm wird versuchen diese Position zu erreichen. Es muss aus diesem Grund sichergestellt werden, dass dies mechanisch auch möglich ist. Anderenfalls muss die Anfangsamplitude entsprechend herabgesetzt werden (s. u.).
Im oberen Frequenzbereich senkt das Programm die Auslenkung automatisch ab, so dass die Strombelastung des Reglers nicht zu groß wird.
Die Positions Bode Plot Funktion ist nur aus dem Hyperterminal verfügbar.
Vorgehensweise
Für das Positions Bode Plot muss sich der Regler in OPMODE 8 (Lage digital) befinden.
- DriveGUI: trennen (Disconnect), Hyperterminal starten. Wenn notwendig PROMPT 133
- MSG 2 lässt die Ergebnisse sofort anzeigen (Empfohlener Modus). Sonst kann das Ergebnis nach Beendigung des Messvorgangs mit GET angezeigt werden.
- PBW startet das Positions Bode Plot. In der Grundeinstellung nimmt der Regler vierzig Werte zwischen 20 und 1500 Hz auf.
- Anzeige im Hyperterminal (Bild 1):
Fünf durch Komma getrennte Spalten. Erste Spalte: Frequenz in Hz. Dann je zwei Spalten für den geschlossenen und für den offenen Regelkreis in denen der Phasenwinkel in ° und der Amplitude in dB angezeigt werden. Zu Beginn wird eine Kopfzeile mit einem P für den Lageregelkreis (Position) und den Bezeichnungen der Spalten ausgegeben. - Der Vorgang kann jederzeit mit den Kommandos STOP, DIS oder K abgebrochen werden. Dies führt zum sofortigen disablen des Antriebs.
- Falls eine grafische Anzeige gewünscht wird, kann das Ergebnis im Bode Plot Modus des DriveGUI durch Drücken des „Refresh“ Buttons geladen werden.
Parameter
Wenn andere Messstützpunkte gewünscht sind, werden diese wie beim Drehzahl Bode Plot aus dem Hyperterminal als Parameter mit dem PBW Befehl übergeben (PBW {fmin} {fmax} {samples} {Auslenkung}). Der letzte Parameter bezeichnet die Auslenkung in counts. Der Defaultwert beträgt hier 2048 counts. Dies entspricht 2,8° elektrisch. Die maximal mögliche Auslenkung beträgt 8192 counts oder 11,2° elektrisch.
Übersicht
CBW Bode Plot im Stromregelkreis
Hyperterminal
Parameter: CBW {Imax}
VBW Bode Plot im Drehzahlregelkreis
Inbetriebnahme Software oder Hyperterminal
Parameter: VBW {fmin} {fmax} {samples} {switch}
PBW Bode Plot im Lageregelkreis
Hyperterminal
Parameter: PBW {fmin} {fmax} {samples} {Auslenkung}
