





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Betrieb von Asynchronmaschinen mit S400-S600
Gültig für S400, S600 mit FW 582...5.99, 7.xx
Allgemeines
Wir empfehlen, zur Grundparametrierung das Tool „Create_Parameterfile_for_Induction_Motor.xls“ zu verwenden. In den meisten Fällen kann damit ein brauchbares Endergebnis erzielt werden.
Sollte wider Erwarten kein ausreichendes Ergebnis erreicht werden, können folgende Parameter angepasst werden.
Motor
- Grundparametrierung mit Tool „Create_Parameterfile_for_Induction_Motor.xls“
- Polzahl: Wert überprüfen. Insbesondere bei Netzfrequenz ungleich 50Hz können beim Erstellen der Parameter schnell Falscheingaben gemacht werden.
- Magnetisierungsstrom: Dieser Wert kann zwischen 20% bis 60% des Io Stromes liegen. Grundsätzlich gilt: Je höher der Wert ist, desto höher ist das Moment und desto kleiner die Enddrehzahl. Ein Feineinstellen in 0.1 A Schritten ist manchmal notwendig. Der Wert muss soweit gesteigert werden bis der Motor der gewünschten Beschleunigungsrampe folgen kann.
- Rotorzeitkonstante. Bei hohen Massenträgheitsverhältnissen muss der aus dem Tool generierte Wert erhöht werden. Sinnvolle Einstellungen liegen dann zwischen 100% - 400% des ursprünglichen Wertes. Eine niederfrequente Schwingung in der Drehzahl kann eine Aussage sein, dass dieser Wert zu klein gewählt ist.
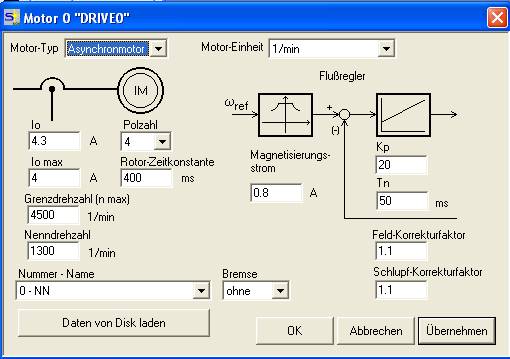
Bild 1: Inbetriebnahmesoftware Seite "Motor"
Feedback
Neben den üblichen Feedbacktypen ist auch ein sensorloser Betrieb möglich. Da beim Sensorless Feedback die Erfassung über die Motorströme erfolgt, kann die tatsächliche Drehzahl aufgrund des Schlupfes von der Solldrehzahl abweichen. Die Drehrichtung des Motors kann nicht anhand des Feedbacks überwacht werden. Eine Verwechslung der Motorphasen bewirkt eine Drehung der Drehrichtung, ohne dass eine Fehlermeldung generiert wird.
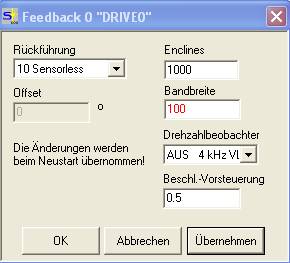
Bild 2: Inbetriebnahmesoftware Seite "Feedback"
Stromregler
Das Einstellen des Stromreglers entspricht dem eines „normalen“ Motors. KP wird von 0.5 in 0.5 Schritten bei aktiviertem Servoverstärker (OPMODE 0, Enable = 1) erhöht, bis der Motor pfeifende Geräusche macht. Danach wird der Wert um ca. 20% reduziert.
TIPP: Der Spitzenstrom (IPEAK) sollte bei Inbetriebnahmen herabgesetzt werden, um mögliche Schäden bei Fehlverhalten zu minimieren bzw. vermeiden. Der Wert kann dann stufenweise angehoben werden, in Abhängigkeit von den einzelnen Tuningmaßnahmen. Ipeak so groß wählen, dass das Reibmoment sicher überwunden wird.
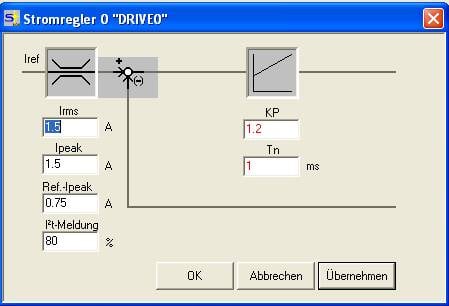
Bild 3: Inbetriebnahmesoftware Seite "Stromregler"
Drehzahlregler
Ein hoher KP-Wert im Drehzahlregler ist die Vorrausetzung für kleine Drehzahlabweichungen. Durch die Erhöhung des PID-T2 Wertes wird dieses ermöglicht. Eventuelle Überdrehzahl Fehlermeldungen (F08) aufgrund von hohen Motorleitungskapazitäten können durch ein Hochsetzen der Tacho- Filterzeitkonstanten T- Tacho vermieden werden.
Nach einer Erhöhung des PID-T2 Werts kann KP im Drehzahlregler erhöht werden. Ziel ist ein hohes KP. Für den PID-T2 Wert gilt: So hoch wie nötig, damit keine Schwingung entsteht, so kleine wie möglich, wenn durch höhere Werte keine weitere KP Steigerung möglich ist.
Die Rampen im Drehzahlregler müssen auf vergleichsweise hohen Werten stehen. Zu kleine Werte verursachen unruhigen Lauf ohne einen Vorteil zu bringen. Werte von 500ms und größer sind sinnvoll.
ACHTUNG !
Der Wert von KP darf nur in ca. 20% Schritten erhöht werden (Bsp: 1 auf 1,2 oder 10 auf 12) bis zur Schwingungsgrenze. Danach sollte der Wert wieder um ca. 10% reduziert werden. Ein Senken des PID-T2 Wertes darf im Gegenzug, bei hohen KP Werten nur in kleinen Schritten erfolgen.
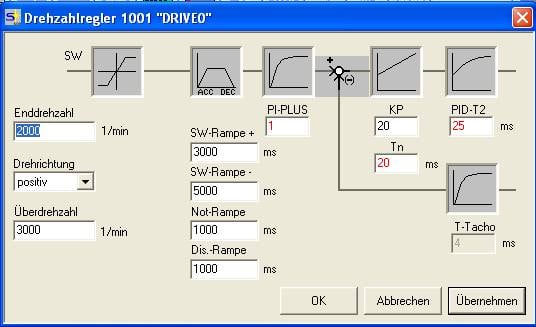
Bild 4: Inbetriebnahmesoftware Seite "Drehzahlregler"
Beispiele (Oszillogramme)
Istdrehzahl Stromistwert Stromsollwert
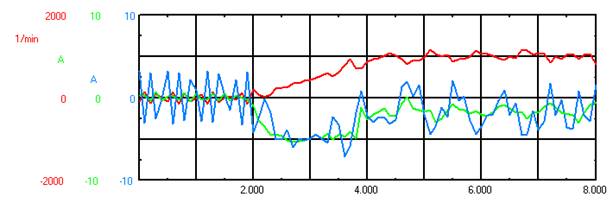
Bild 5: Schlecht abgeglichener Verstärker
Istdrehzahl Stromistwert Stromsollwert
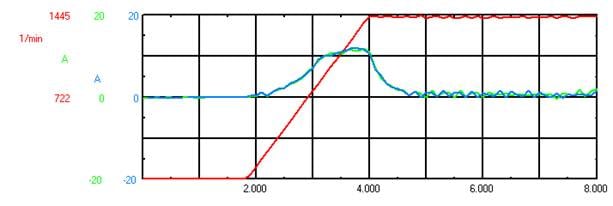
Bild 6: Gut abgeglichener Verstärker
