





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Asynchronmotoren - Allgemeines
Table of Contents
Bauform
Der Antrieb des Drehstrom - Asynchronmotors erfolgt durch ein Drehfeld.
Rotor
- Kurzschlussläufer: Wicklung aus Leiterstäben (Käfigläufer), die untereinander kurzgeschlossen sind. Durch die Leiterstäbe fließen hohe Ströme und erzeugen so zusammen mit den Eisenblechen starke Magnetfelder.
-
Schleifringläufer: Läufer mit Drahtwicklungen, deren Enden auf Schleifringe geführt sind. Die Schleifringe werden während des Anlaufens durch Widerstände verbunden und bei steigender Drehzahl nach und nach kurzgeschlossen. Dieser Rotortyp wird bei großen Leistungen eingesetzt, damit der Anlaufstrom begrenzt werden kann.
Stator
Der Stator (Ständer) besteht aus dem Gehäuse, Blechpaket und der mehrphasigen Ständerwicklung. Die Anschlüsse der Strangwicklungs - Paare werden meist auf ein Klemmbrett herausgeführt, wo sie mit den Kennbuchstaben U1 - U2, V1 - V2 und W1 - W2 gekennzeichnet sind.
Steuerung
Man kann die Motordrehzahl Servoverstärker
steuern, indem man die Frequenz erhöht oder reduziert. Das ist sinnvoll bei Anlagen, die eine variable Drehzahl benötigen, ohne dass ein verstellbares Getriebe eingesetzt werden muss.
Die Asynchronmaschine kann wie ein Transformator betrachtet werden. Die Ständerwicklung ist die Primärseite und der Kurzschlussläufer die Sekundärseite. Der sich einstellende Strom hängt von der Drehzahl ab. Der Läufer dreht sich immer langsamer als das Drehfeld an den Spulen der Primärseite (Schlupf).
Anlaufschaltung
Servo amplifiers können bei entsprechender Programmierung Asynchronmotoren sanft und lastangepasst hochfahren. Eine konventionelle Anlaufschaltung entfällt.
Drehzahlregelung
Unterschiedliche Polzahlen und Frequenzen ergeben folgende Drehzahlen für das Drehfeld:
|
Polzahl |
Polpaarzahl | nsync @ 50 Hz | nsync @ 60 Hz |
|---|---|---|---|
| 2 | 1 | 3000 min−1 | 3600 min−1 |
| 4 | 2 | 1500 min−1 | 1800 min−1 |
| 6 | 3 | 1000 min−1 | 1200 min−1 |
| 8 | 4 | 750 min−1 | 900 min−1 |
Dies sind die Ständerdrehfeld - Drehzahlen, also die Drehzahl, die das Netz dem Motor über die Feldwicklungen im Stator aufprägt. Sie wird auch als synchrone Drehzahl bezeichnet.
Wird die Drehstrom-Asynchronmaschine? auf eine höhere als die synchrone Drehzahl angetrieben, so speist sie Leistung ins Netz zurück (Generatorbetrieb).
Frequenzsteuerung
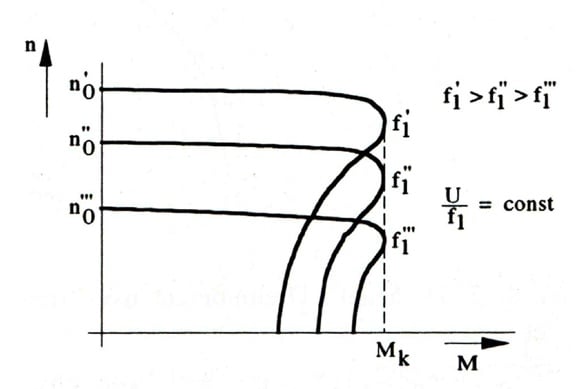
Drehzahl/Drehmoment - Kennlinie
Im Bild sind die Kennlinien für die verschiedenen Frequenzen der Ständerspannung dargestellt. Mit servo amplifiers kann man beliebig Frequenzen erzeugen. Kurzschlussläufermotoren mit Servoverstärker gehören heute zu den modernsten Antrieben.
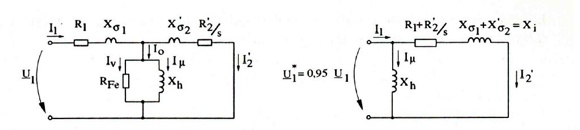
Ersatzschaltbild eines Asynchronmotors a) vollständig (links) b) vereinfacht (rechts)
Durch neueste Entwicklungen auf dem Gebiet der leistungselektronischen Bauelemente wurde und wird die Leistungsfähigkeit dieser Motoren weiter gesteigert.
Back to top