





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Wake und Shake Funktion WSCNFG 0
Gültig für S300, S400, S600, S700
Table of Contents
- Kommutierungswinkel MPHASE
- W&S relevante Parameter
- Zeitlicher Verlauf vom W&S
- Ströme, die beim W&S relevant sind
- Leitfaden zur Einstellung der W&S Parameter (in Sonderfällen)
- Prozessbezogene Grenzen der W&S Funktion
- Minimierung von unkontrollierten Bewegungen
- Praxis: Gewährleistung einer stabilen Funktion.
- Möglichkeit zur Analyse der W&S Funktion
- Vorgehensweise
- Checkliste
- Searchkom Zustände
- Kommutierungsfehler F25
Die W&S Routine besteht aus zwei Teilen. Einer groben Bestimmung des MPHASE Wertes im Strommodus und einer Feinabstimmung im Drehzahlmodus.
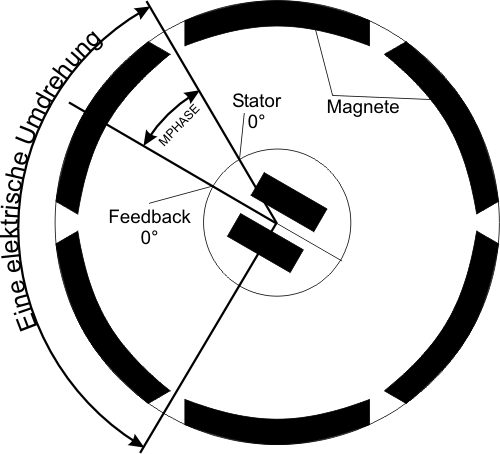
- Grobbestimmung: Am Anfang des W&S werden Stromimpulse mit verschiedenen Raumzeigern (0°, 90°, 180°, 270°) auf den Motor geschaltet. Durch die resultierende Bewegung wird der Winkel Rotor/ Stator Position ermittelt.
- Feinbestimmung: Mit dem Grob bestimmten Phasenwert wird in den Drehzahlmodus umgeschaltet. Nun wird eine Feinabstimmung der Winkels durchgeführt.
Kommutierungswinkel MPHASE
W&S relevante Parameter
| Parameter | Verstärker / FW | Funktion des Parameters für W&S |
|---|---|---|
| IPEAK | S300/S700 | - |
| S400/S600 FW<3.75 | Feinbestimmung: 60% vom eingestellten IPEAK | |
| S400/S600 FW<3.76 – 5.94 | Feinbestimmung: | |
| S400/S600 FW>=5.95 | Feinbestimmung: IPEAK für die IQ Komponente | |
| REFIP | S300/S700 | Feinbestimmung für die IQ Komponente |
| S400/S600 FW<3.75 | Strom zur Grobbestimmung im Strommodus | |
| S400/S600 FW<3.76 – 5.94 | Strom zur Grobbestimmung im Strommodus | |
| S400/S600 FW>=5.95 | Strom zur Grobbestimmung im Strommodus | |
| REFIP2 | S300/S700 | Strom zur Grobbestimmung im Strommodus Feinbestimmung für die ID Komponente |
| S400/S600 FW<3.75 | - | |
| S400/S600 FW<3.76-5.94 | - | |
| S400/S600 FW>=5.95 | Feinbestimmung: REFIP2 für die ID Komponente | |
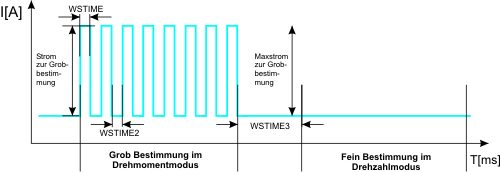
| WSTIME | S300/S700 S400/S600 FW>5 | Zeit des Stromimpulses im Strommodus in ms. |
| WSTIME2 | S300 FW>2.26 S400/S600 FW>7.33 | Zeit zwischen zwei Stromimpulses im Strommodus in ms. |
| WSTIME3 | S300/S700 FW>2.25 | Zeit zwischen der Grob und der Feinabstimmung in ms |
| WSLOOP | S300/S700 S400/S600 FW>5.81 | Anzahl der W&S Durchgänge vor der Mittelwertbildung Für die FW Versionen 5.82 –5.99 und 7.00 – 7.32 WSLOOP auf 1 setzen (S400 / S600) |
| VCOMM | S300/S700 S400/S600 | Empfindlichkeit der F25 – Kommutierungsfehlerüberwachung. Bei VCOMM=VLIM ist die Überwachung abgeschaltet |
| VCTIME (msec) | S300/S700 FW>2.31 | Notwendige Dauer zur Auslösung eines F25 bei unterschiedlichen Vorzeichen. |
| LAST25 | S400/S600 FW>5.95 | Art des F25 Fehler (Siehe Liste unten) |
| M SEARCHKOM 0 | S300/S700 S400/S600 FW>5 | Abschalten des W&S vor dem ersten Enabeln |
| M SEARCHKOM 1 | S300/S700 S400/S600 FW>5 | Auslösen eines neuen W&S Vorgangs |
| SEARCHKOM (Im Oszilloskop unter benutzerdefiniert) |
S300/S700 S400/S600 | Status des W&S Vorgangs |
| VLO | S300/S700 S400/S600 | Beschleunigungsberücksichtigung Beobachter Feedback |
| FILTMODE | S300/S700 S400/S600 | Beobachter Einstellung |
| MLGQ / GV / GVTN | S300/S700 S400/S600 | Verstärkungen der Strom und Drehzahlreglers |
Zeitlicher Verlauf vom W&S
Ströme, die beim W&S relevant sind
S300/S700
Grobbestimmung: REFIP2
Feinbestimmung: REFIP2 für die ID Komponente, IPEAK für die IQ Komponente
S400/S600
<= 3.75
Grobbestimmung: REFIP
Feinbestimmung: 60% vom eingestellten IPEAK
3.76 - 5.94
Grobbestimmung: REFIP
Feinbestimmung: IPEAK
5.95
Grobbestimmung: REFIP
Feinbestimmung: REFIP2 für die ID Komponente, IPEAK für die IQ Komponente
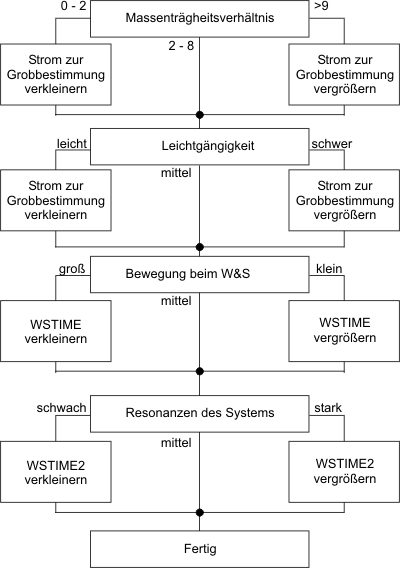
Leitfaden zur Einstellung der W&S Parameter (in Sonderfällen)
| Nr. | Applikation | Maßnahme |
|---|---|---|
| 1 | Schwergängige Mechanik, Hohes Gewicht | REFIP und REFIP2 erhöhen |
| 2 | Leichtgängige Mechanik, Kleines Gewicht | REFIP und REFIP2 verkleinern |
| 3 | Schwingen der Achse | Strom (CTUNE) und Drehzahlregler müssen richtig eingestellt sein. |
| 4 | System mit Resonanzen | Über die Parameter WSTIME und WSTIME2 eine „Wartezeit“ zum Abklingen einbauen. |
| 5 | Linearmotoren | VLO Werte zwischen 0 und 0.2 |
Prozessbezogene Grenzen der W&S Funktion
Im vorhergehenden Abschnitt wurde beschrieben, dass aus der Positionsänderung, die aus dem eingeprägten Strom entsteht, der Winkel bestimmt wird.
Dadurch leitet sich allerdings ab, dass im Moment des W&S nur eine Bewegung erfolgt, die durch die Bestromung selber hervorgerufen worden ist.
Gibt eine äußere Anregung zu einer Bewegung, so wird dies mitgemessen und der Winkel wird unter Umständen falsch bestimmt.
Störende äußere Anregungen können sein:
- Starkes Vibrieren der Maschine durch andere Komponenten.
- Andere Achsen, die zum selben Zeitpunkt ein W&S machen.
- Querkräfte.
- Eine bewegte Achse beim W&S Start.
- Ein schwingfähiger Aufbau. Die durch den ersten W&S Impuls erfolgte Anregung im System verfälscht die weitere Messung.
Minimierung von unkontrollierten Bewegungen
Trotz allen Sicherheitsmaßnahmen gibt es Konstellationen, die eine unkontrollierte Bewegung des Motors ermöglichen:
- bei einer nicht korrekten Ermittlung des Kommutierungswinkels.
- Bei einem nicht korrekt gespeicherten Winkels.
- Bei einer nicht korrekten Ausrichtung des Feedbacks.
- Bei einem Dreher in den Motorphasen.
- Bei einem Dreher in der Feedbackleitung.
- Bei nicht korrekt eingestellten DIR Wert.
- Bei einer nicht korrekt eingestellten Auflösung des Feedbacks.
Um die Energie in den bewegten Elementen zu minimieren, empfehlen wir zwei mögliche Strategien:
Methode I – F25 / F08 direktes Abschalten
ERRCNFG 83894402 -> Sowohl ein F08 (Überdrehzahl) als auch ein F25 (Kommutierungsfehler) führen zum sofortigen Abschalten der Endstufe (Kein Herunterrampen), ebenfalls bei Überspannung / Endstufenfehler / STO Option.
VCOMM verkleinern z.B. 5 -> Fehler F25 wird schneller erkannt. Achse hat keine Zeit Energie aufzubauen.
VOSPD auf kleinst möglichen Wert stellen -> (Zu) schnelle Bewegungen führen zum F08 (Überdrehzahl). Eine dynamische Anpassung wäre auch denkbar.
Methode II – F25 direktes Abschalten / F08 herunterrampen
ERRCNFG 83894274 -> Ein F25 ( Kommutierungsfehler führt zum sofortigen Abschalten der Endstufe (kein Herunterrampen), ebenfalls bei Überspannung / Endstufenfehler / STO Option.
-> Ein F08 (Überdrehzahl) führt zum schnellen Herunterrampen. Ist dieses nicht möglich, wird nach 20% der Zeit EMRGTO die Endstufe gesperrt.
EMRGTO auf 1,5 x DECSTOP -> Rampe im Fehlerfall. Die Rampe muss hierbei so gewählt werden das diese möglichst kurz ist der Motor aber vom Strom und der Mechanik her noch folgen kann.
Beispiel:
DECSTOP 200 (ms) / EMRGTO 300 (ms) !! Einheit EMRGTO immer in ms. DECSTOP in ACCUNIT !!.
VCOMM verkleinern z.B. 5 -> Fehler F25 wird schneller erkannt. Achse hat keine Zeit Energie aufzubauen.
VOSPD auf kleinst möglichen Wert stellen -> (Zu) schnelle Bewegungen führen zum F08 (Überdrehzahl). Eine dynamische Anpassung wäre auch denkbar.
Tipp:
Fehler weich resetieren:
DRVCNFG2 1073741824 -> F04 und F25 können soft (ohne Neustart) zurück gesetzt werden. Erheblicher Zeitgewinn bei Feldbussystemen.
Praxis: Gewährleistung einer stabilen Funktion.
Um eine stabile Funktion zu gewährleisten, ist eine korrekt Parametrierung notwendig.
- Eine „richtige“ Einstellung des anregenden Stromes. (Siehe Einstellmöglichkeiten W&S)
- Bei Linearmotoren mit einer steifen Kopplung des Feedbacks sind kleine Werte für den Beobachter notwendig. Beim S300 sollte eine automatische Einstellung mit dem Befehl „OTUNE“ durchgeführt werden.
- Die Parametrierung des Reglers muss korrekt sein. Ein zu hohe Verstärkung führt zu einem Schwingen. Eine zu kleine Verstärkung bewegt den Motor nicht ausreichend.
Möglichkeit zur Analyse der W&S Funktion
- Tritt während des W&S ein Kommutierungsfehler auf, so kann über die Makro Variable LAST25 die Ursache der Meldung ermittelt werden.
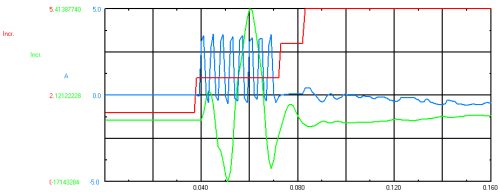
- Über ein Scope Bild der W&S Prozedur können Ursachen, wie eine nicht geöffnete Bremse, starke Resonanzen oder ähnliche Ursachen ermittelt werden.
Strom Drehzahl SEARCHKOM
Vorgehensweise
Checkliste
| Nr. | Überprüfen | Maßnahme |
|---|---|---|
| 1 | Sind die Servostar Parameter an die Anwendung (Masse) angepasst worden? | Verstärkungen korrigieren. |
| 2 | Kann der Motor sich in einem kleinen Bereich bewegen? | Eingefallene Bremse oder mechanische Blockade beseitigen. |
| 3 | Steht die Achse still beim Start des W&S? | Anregung zur Bewegung beseitigen. |
| 4 | Reicht der anregende Strom aus, um die Trägheit und die Reibung des Systems zu überwinden? | REFIP / REFIP2 erhöhen |
| 5 | Stimmen das Drehfeld des Motors mit der Zählrichtung des Feedbacks überein? | Drehfeld ändern. (Zwei Phasen tauschen) |
| 6 | Gibt es eine einwandfreie Funktion des Feedback auf der gesamten Verfahrstrecke? | Von Hand die Achse bewegen. |
| 7 | Ist die Auflösung des Feedbacks richtig skaliert? (ENCLINES (SinCos)= Polpitchbreite / Auflösung) !! ENCIN (TTL) | Enclines (ENCIN) korrigieren. |
| 8 | Bei Linearmotoren: Ist der Beobachter an die starre Kopplung des Feedbacks angepaßt worden? | VLO verkleinern. VLO 0 schaltet den Beobachter aus. S300 OTUNE durchführen. |
| 9 | Gibt es eine sehr starke Bewegung beim W&S z.B. bei luftgelagerte Motoren. | REFIP verkleinern. |
| 10 | Nur S300/S700 / Filtmode 2 -> Smith Predictor. Ist die Motorinduktivität und der Widerstand korrekt eingetragen? |
Korrekte Werte eintragen. |
| 11 | Bei Fremdmotoren: Ist ein CTUNE durchgeführt worden? | CTUNE ( Stromregler) einstellen |
Searchkom Zustände
1: Umschalten auf OPMODE=2
2: Ausgangsposition sichern
3: Bestromung und Grobbestimmung OPMODE=2, Ablauf von WSTIME3
4: Umschalten auf OPMODE=0
5-8: Feinbestimmung in x%ID von REFIP2
9: Berechnung von MPHASE
10: Rückkehr zum ursprünglichen OPMODE und erfolgreiches ENDE von W&S
20: Rückkehr zum ursprünglichen OPMODE mit Fehler
Kommutierungsfehler F25
Der Kommutierungfehler F25 ist eine Sammelfehlermeldung, die mehrere Ursachen haben kann.
S400 / S600, LAST25
Um die Ursache dieser Fehlermeldung besser eingrenzen zu können, wurde ab der Firmware 5.97 die Macro Variable LAST25 eingeführt. Diese Variable enthält eine Kennung, die bei jedem Auftreten eines F25 Fehlers neu eingetragen wird. Sie kann mit dem Kommando „M LAST25“ abgefragt werden.
Es sind folgende Kennungen möglich:
- LAST25 = 0 W&S Schleppfehler Überwachung
Während der gesamten W&S Phase hatte der Antrieb mehr als 1.5 mechanische „Umdrehung“ gemacht - LAST25 = 1 W&S Phase 1 (Grobbestimmung)
Auslenkung zu groß: der Abstand zwischen der Position vor und nach der Bestromung ist größer als 35 Grad (elektrisch). - LAST25 = 2 W&S Phase 1 (Grobbestimmung)
Auslenkung zu klein: Die Summe der Quadrate der Auslenkungen ist kleiner als WSAMPL (oder 65536/ENCLINES falls WSAMPL=0) - LAST25 = 3 W&S Phase 2 (Feinbestimmung)
Iq Strom zu Groß: Wenn am Ende der Phase 2 der Strom größer als 7.6% von DIPEAK ist, so deutet dies auf einen falschen Kommutierungswinkel hin. - LAST25 = 4 W&S nach der Phase 2 (Feinbestimmung).
Die Differenz zwischen dem MPHASE aus der Phase 1 (Grobbestimmung) und MPHASE aus der Phase2 (Feinbestimmung) ist größer als 30 Grad. - LAST25 = 5 HALL fehlerhafte Segmentnummer beim Einschalten des Verstärkers
Beim Einlesen der Hall Signale wurden Segmente 0 oder 7 erkannt. Dies deutet auf fehlerhaftes Kabel hin. - LAST25 = 6 HALL fehlerhafte Segmentnummer beim Segmentwechsel.
Beim Einlesen der Hall Signale wurden Segmente 0 oder 7 erkannt.Dies deutet auf fehlerhaftes Kabel hin. - LAST25 = 7 frei
- LAST25 = 8,9 Übergeordnete Überwachung des Kommutierungsfehlers.
Dieser Fehler wird ausgelöst, wenn die Istdrehzahl oberhalb der Schwelle VCOMM liegt, der Iststrom größer als ICONT ist und das Vorzeichen des Stromes nicht zu der Istbeschleunigung passt (z.B. Bremsvorgang bei positiver Drehzahl und positivem Strom). Die Überwachung spricht erst an, wenn der beschriebene fehlerhafte Zustand mindestens 12 msek andauert.
S300 / S700, ERRCODE2
Um die Ursache dieser Fehlermeldung besser eingrenzen zu können, wurde die Variable ERRCODE2 eingeführt. Diese Variable enthält eine Kennung, die bei jedem Auftreten eines F25 Fehlers neu eingetragen wird. Sie kann mit dem Kommando „ ERRCODE2 “ abgefragt werden. s.u.
- ERRCODE2 = 8 W&S Schleppfehler Überwachung.
Während der gesamten W&S Phase hatte der Antrieb mehr als 1.5 mechanische „Umdrehung“ gemacht - ERRCODE2 = 9 W&S Phase 1 (Grobbestimmung). Auslenkung zu groß.
Der Abstand zwischen der Position vor und nach der Bestromung ist größer als 35 Grad (elektrisch). - ERRCODE2 = 10 W&S Phase 1 (Grobbestimmung). Auslenkung zu klein.
Die Summe der Quadrate der Auslenkungen ist kleiner als WSAMPL (oder 65536/ENCLINES falls WSAMPL=0) - ERRCODE2 = 11 W&S nach der Phase 2 (Feinbestimmung).
Die Differenz zwischen dem MPHASE aus der Phase 1(Grobbestimmung) und dem MPHASE aus der Phase2 (Feinbestimmung) ist größer als 30 Grad. - ERRCODE2 = 12 W&S Phase 2 (Feinbestimmung). Iq-Strom? zu Groß.
Wenn am Ende der Phase 2 der Strom größer als 7.6% von DIPEAK ist, so deutet dies auf einen falschen Kommutierungswinkel hin.
Ursachen für den Kommutierungsfehler (F25) / VCTIM - Beschreibung
S300 (Stand: 03.08.2008)
1. Während des normalen Betriebes
a. Beschleunigungs-/Bremsphase
Der Kommutierungsfehler F25 liegt vor, wenn das Vorzeichen des Stromistwertes und das Vorzeichen der Geschwindigkeitsänderung nicht zueinander passen (8 msec lang). Dies deutet auf das Durchgehen des Motors hin und wird durch sofortiges Sperren der Endstufe unterbunden. Der Kommutierungsfehler wird nur dann überwacht, wenn die aktuelle Drehzahl die eingestellte Schwelle VCOMM überschreitet. Um die Überwachung abzuschalten, muss der Schwellenwert VCOMM auf den maximal möglichen Wert gesetzt werden.
b. konstante Drehzahl
Der Kommutierungsfehler liegt vor, wenn bei einer konstanten positiven Drehzahl, das Vorzeichen des Stromistwertes negativ ist und dessen Betrag die Hälfte des max. Wertes überschreitet (VCTIME msec lang). Der Kommutierungsfehler wird nur dann überwacht, wenn die aktuelle Drehzahl den kleineren der beiden Werte VLIM/2 und VCOMM überschreitet. Um diese Überwachung abzuschalten, muss der Schwellenwert VLIM und VCOMM auf einen größeren Wert gesetzt werden (falls möglich). Über den Parameter VCTIME kann die Empfindlichkeit der Überwachung eingestellt werden. Bei VCTIME=0 erfolgt die Meldung des Kommutierungsfehlers ohne Verzögerung. Im Falle einer Fehlermeldung während des regulären Betriebes, sollte die Zeit und/oder der Schwellenwert VCOMM erhöht werden.
2. Während der Wake&Shake – Phase
Wenn während der Wake&Shake - Phase (Ermittlung von MPHASE bei FBTYPE=7),eine Drehzahl größer als 180 UPM gemessen wird, so deutet das auf das Durchgehen des Motors hin und führt zum Sperren der Endstufe. Der Fehler F25 wird auch dann generiert, wenn während der W&S - Phase eine zu geringe Amplitude des Sinus/Cosinus - Signals gemessen wird (< 10% von Nominalwert)
3. Beim Einsatz eines Hall - Sensors
(FBTYPE=11, FBTYPE=12) wird der Fehler F25 generiert, wenn vom Hall - Sensor eine nicht zulässige Segmentnummer (0 oder 7) eingelesen wurde.
Back to top