





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Resolver Auswertung über FPGA mit Delta Sigma Technologie
Gültig für S700
Einführung
Hochleistungs Servoantriebe sind ein schnell wachsender Markt. Resolver sind häufig verwendete Motor Positionsgeber, Bild 1. Moderne Regler leiten aus den Positionswerten auch eine Geschwindigkeits - Rückführung ab. Der Resolver ist ein elektromagnetisches, rotierendes Gerät, das Winkelabweichungen ermittelt. Ein elektrisches Ersatzschaltbild und ein Diagramm mit typischen Ausgangssignalen wird in Bild 2 gezeigt. Eine Wechselstrom Erregungssignal wird an die Primärwicklung angelegt (Rotor, REF). Die Wicklung ist induktiv gekoppelt an zwei Sekundärwicklungen (Stator, Sinus und Kosinus). Die Übersetzungsrate ist amplitudenmoduliert durch den Sinus und Kosinus des Rotorwinkels relativ zum Stator, θ.

Bild 1: Größe 21 Resolver (Litton)
Wegen des Transformatorprinzips ist eine AC Erregung (Referenzsignal) erforderlich:
![]() (1)
(1)
Die Trägerfrequenz fC ist immer ein Kompromiss. Um hohe Verzögerungszeiten im Wandlungssystem zu verhindern ist eine hohe Frequenz sinnvoll. Lange Kabel und die mechanische Kontruktion der Resolver begrenzen jedoch die Trägerfrequenz. Die meisten Resolver Datenblätter empfehlen eine Trägerfrequenz von 5 bis 10kHz. In Servo Applikationen ist diese Frequenz sehr häufig verknüpft mit der Schaltfrequenz der Endstufe und der Aktualisierungsrate der Servoregelkreise.
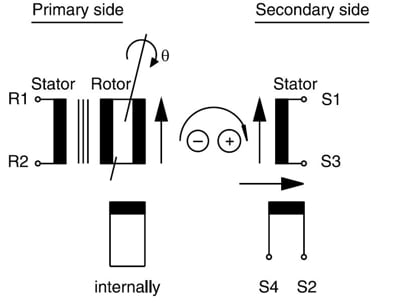
Bild 2: Elektrisches Ersatzschaltbild eines Resolvers
Die Kollmorgen SERVOSTAR Produktfamilie betreibt den Resolver mit einer 8kHz Trägerfrequenz {1}.
Resolver - Digital Wandlung (RDC)

Bild 3: Typisches Resolver Ausgangssignal
Eingangssignale für die Winkelberechnung sind zwei Spannungen der sekundären Wicklungen, Bild 3:
![]() (2)
(2)
![]() (3)
(3)
Die theoretische Berechnung ist eine einfache Formel mit einer Division und einer zusätzlichen arctan Berechnung:
![]() (4)
(4)
Die technische Umsetzung ist etwas komplizierter. Ausführen einer Division und einer Arctan Berechnung ist nicht trivial in einem embedded System. Speziell in dem Augenblick, wenn die Signale (wegen der Trägerfrequenz) gleich Null sind (4), ist die Gleichung nicht anwendbar.
Entsprechend dieser Beschränkungen verwenden die meisten Algorithmen eine "tracking" Regelschleife.
Die Mathematik basiert auf den folgenden trigonometrischen Beziehungen:
![]() (5)
(5)
Durch Ersetzen von A mit dem realen Rotorwinkel θ und B mit dem negativen, geschätzten Rotorwinkel ![]() erhalten wir:
erhalten wir:
![]() (6)
(6)
Nach Definition des geschätzten Fehlers
![]()
und verwendung einer Taylor Annäherung um Null
![]()
erhalten wir:
![]()
oder
![]() (8)
(8)
Mit Demodulation des Trägersignals:
![]() (9)
(9)
![]() (10)
(10)
Dies ist die grundsätzliche mathematische Basis für den Resolver Tracking Algorithmus, Bild 4.

Bild 4: Resolver Tracking Schleife
Die resultierende Transferfunktion dieser Tracking Schleife ist:
 (11)
(11)
Bandbreite ![]() und Dämpfung δ hängen von den beiden Parametern des PI Reglers ab. Meist wird die Bandbreite auf einen Wert im Bereich von 1000 Hz gesetzt und das System ist leicht gedämpft, δ = 0.5.
und Dämpfung δ hängen von den beiden Parametern des PI Reglers ab. Meist wird die Bandbreite auf einen Wert im Bereich von 1000 Hz gesetzt und das System ist leicht gedämpft, δ = 0.5.
Vorteile des Tracking Algorithmus sind:
- Die Wandlung benötigt nur eine Sinus und Kosinus Funktion anstelle der Division und arctan Funktionen
- Ein Filter zweiter Ordnung zur Störungsunterdruckung ist integriert
Spezielle RDC Chips
Der traditionelle Ansatz ist die Verwendung von integrierten Resolver / Digital Wandlerchips. Analog Device zum Beispiel bietet einige RDC IC's an.
Das Analog Device 2S82 Produkt ist ein vollständiger RDC Tracking Wandler mit 12 bis 16 Bit Auflösung. Der Wandler akzeptiert 2V rms ±10% analoge Eingangssignale an den SIN, COS und REF Eingängen. Eine Typ II Regelschleife wird für das Tracking der Eingänge und konvertiert die Sinus und Cosinus Eingangsinformationen zur digitalen Entsprechung der Rotor Winkels θ. Durch Auswahl der externen Widerstands- und Kapazitätswerte kann der Nutzer die Bandbreite, die maximale Trackingrate und die Geschwindigkeitsskalierung des Konverters bestimmen, um den Anforderungen des Systems zu genügen {2}.
Die Entwickler eines Servoantriebes erhält mit diesen RDC Chips erprobte, direkt einsetzbare Lösungen mit bekannter Spezifikation.
Die Nachteile von spezialisierten Schaltkreisen sind:
- hohe Kosten für den RDC Chip
- zusätzlicher Platzbedarf auf der Platine
- begrenzte Performance: das Design muss entweder für hohe Geschwindigkeit oder für hohe Auflösung optimiert werden
- begrenzte Flexibilität: feste Tracking Bandbreite, keine Kompensation von Sinus/Kosinus Verstärkungsfehler
- Phasenverzögerung wegen des Tracking (abhängig von der Tracking Bandbreite)
Wegen dieser Nachteile benutzen moderne Servoverstärker keine speziellen RDC Chips. Moderne Verstärker sind meist mit einem Field Programmable Gate Array (FPGA) ausgerüstet oder reservieren CPU Resourcen für die Feedback Auswertung. Diese Logik Konfiguration wird flexibel gestaltet für verschiedene Feedback Interface Typen.
Software Resolver - Digital Wandler
AD Wandler mit Multiplex Eingängen werden häufig in digitalen Servoverstärkern verwendet. {3}. Das Referenzsignal VREF (idealer Sinus) wird über einen Filter höherer Ordnung von einem digitalen (Rechteck) Signal erzeugt. Die sekundären Signale VSIN und VCOS werden mit zwei verfügbaren Kanälen abgetastet, typisch mindestens beim Maximum (2πfCt = π /2) und Minimum (2πfCt = 3π /2) des Referenzsignals. Wegen der Max, Min Abtastung ist die Träger Demodulation nur eine Vorzeichenänderung:
![]() (12)
(12)
Die Aktualisierungsrate dieser Trackingschleife ist doppelt so hoch wie die Resolver Referenzfrequenz::
![]() (13)
(13)
Die Trackingschleife wird meist mit DSP Algorithmen in einem Echtzeit Task des Mikroprozessors im Verstärker realisiert (Software).
Um eine RDC Bandbreite von mehr als 1 kHz mit einem akzeptablen Störabstand zu erhalten, benötigen die analogen Resolver Signale ein spezielle Filterung. Üblich ist ein Tiefpass Filter 2. Ordnung oder ein Bandpass Filter. Nachteil dieser Filter höherer Ordnung ist die Phasenverschiebung. Selbst bei Auswahl von Bauteilen mit niedriger Toleranz bei der Produktion kann die Phasenverschiebung des Trägersignals sich erheblich von Verstärker zu Verstärker unterscheiden.
Bei Verwendung eines AD Wandler mit 12 Bit Abtastung und Gaußscher Fehlerverteilung kann der Rotorwinkel eine Genauigkeit von bis zu 14,5 Bit / Umdrehung haben.Die zusätzlichen 2,5 Bit kommen vom arctan:
![]()
Dieser "Software RDC" benötigt nur wenige zusätzliche, preiswerte Hardware Komponenten. Der Anwender kann die gewünschte Bandbreite für jede Applikation separat einstellen. Eine Entscheidung zwischen hoher Motordrehzahl oder hoher Auflösung ist nicht erforderlich.
Wegen der rauen EMV Umgebung in einem Servoverstärker ist es recht schwierig, die volle Performance aus einem 12 Bit getasteten AD Wandler zu erzielen. Mit einer hohen Tracking Bandbreite ist die Rotorwinkel Auflösung von 14,5 Bit nur theoretisch. Mehr als 12 Bit (= 5 Winkelminuten) Auflösung zu erhalten ist nicht trivial. Verkleinern der Tracking Bandbreite reduziert die Störungen des gemessenen Rotorwinkels.
Der Nachteil ist, dass - zusammen mit der einer niedrigeren Bandbreite - die Phasenverschiebung des RDC Systems steigt. Diese Phasenverschiebung kann zu einer Instabilität des Drehzahlreglers führen.
Lünberger Beobachter
Die RDC Trackingschleife arbeitet wie ein Filter 2. Ordnung, reduziert hochfrequente Störungen, erzeugt aber gleichzeitig eine Verschiebung zwischen mechanischem Rotorwinkel und dem RDC Ausgang. Phasenverschiebungen in einem Regelkreis sind bekannt für negative Effekte wie reduzierte Stabilität und reduzieren die mögliche Verstärkung; letzendlich reduziert die Phasenverschiebung die Maschinenleistung.
Die Verwendung von Beobachtern ist bekannt, um die Performance von Servoverstärkern zu erhöhen. Beobachter kombinieren Betriebsdaten und Feedback Signale um daraus mehr Kenntnisse des Betriebsstatus abzuleiten, als durch Messung des Feedback Systems alleine vorhanden wären. Ein traditioneller Tracking RDC kann zum Beobachter umfunktioniert werden. Durch Kombination von Kenntnissen über den Betrieb des Servosystems mit dem Feedback des Resolvers reduziert der Beobachter die Phasenverschiebung im RDC. zusätzlich kann der Beobachter benutzt werden, um Motorbeschleunigung und Störmomente abzuleiten.
Die RDC Trackingschleife wird mit einem gemessenen Beschleunigungssignal (oder dem Motorstrom iq) erweitert zu einem Lünberger Beobachter ohne Phasenverschiebung, Bild 5 {4}.
Bild 5: RDC basierter Lünberger Beobachter {4}.
Verglichen mit einem hochauflösenden Encoder hat diese Konfiguration weiterhin zwei wichtige Grenzen:
Genauigkeit und Auflösung
Die Genauigkeit hängt weitgehend von der spezifizierten Resolver Performance ab. Mehr als 8 Winkelminuten (~ 11,5 Bit) Genauigkeit bei einem Resolver ist nicht üblich.
Die Auflösung hängt nur von der Resolver Digital Wandlung ab:
- Auflösung AD Wandler - Störungen
- arctan oder sin/cos Implementierung und
- Genauigkeit der digitalen Signalverarbeitung
Die begrenzte Auslösung erzeugt in Systemen mit hoher Bandbreite deutlich hörbare Geräusche. Die Geräusche können durch verkleinern der Tracking Bandbreite (=Filterung) reduziert werden, was gleichzeitig das Reaktionsvermögen auf Verzerrungen des Servokreises reduziert.
Die Vorteile eines AD Wandlers mit Software RDC mit Lünberger Beobachter sind:
- geringe zusätzliche Kosten wegen der bereits vorhandene AD Kanäle und CPU Resourcen
- wenig zusätzlicher Platzbedarf auf der Platine (Aufbereitung der Analogsignale)
- keine Begrenzung der Motor Drehzahl
- konfigurierbare Bandbreite
- keine Phasenverschieben durch Lünberger Beobachter
- Kompensation von sin/cos Verstärkungsfehlern
Die Nachteile sind:
- begrenzte Auflösung (AD Quantelung)
- begrenzte EMV Festigkeit (S&H)
- analoger Filter zur Störungsunterdrückung
- Phasenverschiebung des Referenzsignals durch analoge Filter
Delta Sigma Technologie
Das neue ΔΣ Tracking RDC Konzept bewegt sich soweit wie möglich im digitalen Bereich. Digitale Filter bieten volle Wiederholbarkeit. Frequenzabhängige Dämpfung und Phasenverschiebung können während der Produktion nicht variieren.
Die Erzeugung eines idealen Sinus Signals mit einem ΔΣ Modulator benötigt nicht viele Resourcen. Bild 6 zeigt das Blockschaltbild eines DA Modulators mit einfachen digitalen Schaltkreisen. Der Modulator erzeugt aus den 12 Bit Eingangsdaten mit niedriger Abtastrate einen oversampleten 1 Bit breiten Bitstrom.
Bild 6: Einfacher 12 Bit ΔΣ Digital / Analog Wandler
Dieser Bitstrom wird im FPGA mit einer Aktualisierungsrate von 10 MHz generiert. Die gewünschte Trägerfrequenz des Referenzsignals ist 1250 mal kleiner (8 kHz). Auf der Analogseite beseitigt ein einfacher Tiefpass Filter 2ter Ordnung mit ~100 kHz Grenzfrequenz die harmonischen Schwingungen ohne eine signifikante Phasenverschiebung der Trägerfrequenz zu erzeugen.
Das Referenzsignal wird im FPGA über eine interpolierte sin-cos Tabelle erzeugt. Parameter für die Sinuswellen Generierung sind Amplitude und Phase. Diese Parameter werden verwendet, um das Verstärkungs- und Phasenverhalten des (über Kabel) angeschlossenen Resolvers zu kompensieren. Das Resultat ist ein analoges Referenzsignal mit einstellbarer Verstärkung E0 und Phase φC und einer nahezu perfekten Sinuswelle, Bild 7.
Bild 7: Schema der ΔΣ basierten sinusförmigen Referenzsignal Generierung
Betrachtet man eine ΔΣ AD Wandlung, gibt es drei wichtige Design Kriterien::
- Ordnung M des ΔΣ Modulators
- Oversampling Rate OSR
- Auswahl des Dezimierungs Filters
Der beschriebene ΔΣ basierte RDC verwendet einen Modulator 2ter Ordnung (M = 2) ADS 1204 von Texas Instruments {5}, Bild 8. Die maximal spezifierte Abtastfrequenc ist fΣΔ = 16 MHz. Durch Wahl einer Oversampling Rate von OSR = 128 erhalten wir eine AD Wandler Aktualisierungsrate von:
![]() (14)
(14)
Diese Konfiguration gibt uns exakt 16 Abtastungen pro Referenz Sinus Periode (8kHz).
Bild 8: SD Modulator 2ter Ordnung (M = 2) {5}
Nach Bild 9 liefert der TI Modulator ADS1204 mit einer OSR von 128 und einem Sinc3 Filter ein Resultat mit 14 Bit Genauigkeit. Verkleinern der OSR auf 64 würde die Genauigkeit nur um 2 Bit auf 12 Bit verkleinern. Vergrößern der OSR auf 256 vergrößert die Genauigkeit nicht signifikant, verdoppelt aber die Wandlungszeit auf 47 µs. Längere Wandlungszeit reduziert die RDC Dynamic.
Bild 9: Wirksame Bitzahl (ENOB) gegenüber der Oversampling Rate OSR {5}
Der Modulator erzeugt nur einen Bitstrom, der sich von dem digitalen Wort eines AD Wandlers unterscheidet. Um ein digitales Wort als Äquivalent zur analogen Eingangsspannung zu erhalten, muss der Bitstrom von einem digitalen Filter bearbeitet werden. Ein sehr einfacher, mit wenig Aufwand und Hardware aufgebauter Filter ist der SINC Filzter. Die Frequenzantwort eines Filters 3ter Ordnung ist in Bild 11 dargestellt.

Bild 10: Sinc3 Dezimierungsfilter Implementierung (M = OSR = 128: fs = 16 MHz, F = 128 kHz) {6}
Der sinc3 ist ein sehr einfach strukturierter Filter, der wenig Hardware Resourcen benötigt, Bild 10.
![]() (15)
(15)
Die Dämpfung der Trägerfrequenz ist symmetrisch (sin con) und nur 0,2 dB stark.
Bild 11: Frequenzantwort eines sinc3 Filters {6}
Bild 12: Schema des ΔΣ analog/digital Wandlers mit Modulation, digitalem Tiefpass Filter und Verkleinerung der Abtastrate
Bild 12 zeigt das Schema eines AD Wandler Systems. Bevor die Trackingschleife aufgebaut wird, sollten einige Korrekturen beachtet werden:
- Wegen der Bauteiltoleranzen kann eine Verstärkungsdifferenz zwischen Sinus und Kosinus Kanal entstehen. Um diesen Verstärkungsfehler zu kompensieren, sollte mindestens ein Kanal einen Verstärkungskorrekturfaktor erhalten
- In System mit hoher Bandbreite müssen die beiden Konverter Offsets kompensiert werden
- Die von Resolver und Kabel abhängige Phasenverschiebung des Trägersignals sollte angepasst werden
Bild 13 zeigt das komplette ΔΣ RDC System. Das System arbeitet mit 3 unterschiedlichen Aktualisierungsfrequenzen.
- 10 MHz für die Erzeugung des Referenzsignals
- 128 kHz für das ΔΣ AD Wandler Ergebnis und die Demodulation
- 16 MHz für die Positionsinterpolation

Bild 13: Blockschaltbild des neuen ΔΣ Resolver - Digital Wandlers
Durch das integrierte Arbeitsprinzip des ΔΣ AD Wandlers ist die Störsicherheit deutlich besser verglichen mit einem abtastenden AD Wandler. Ein Tiefpass höherer Ordnung für die analogen Signale ist nicht erforderlich. Die 8-fache höhere Aktualisierungsfrequenz verglichen mit dem Software RDC stellt eine hohe Bandbreite bei der Wandlung sicher.
Das ΔΣ RDC wird getestet mit einem speziellen Doppelfeedback Servomotor. Ein Kollmorgen S300 Servoverstärker betreibt den Motor mit einem SinCos Encoder bei sehr niedriger Geschwindigkeit. Der zusätzliche Resolver ist an einen einfachen, im Labor gebauten Schaltkreis mit dem TI ΔΣ Modulator und dem ΔΣ DA Wandler angeschlossen.

Das verwendete FPGA ist ein Stratix I von Altera auf dem Altera DSP Entwiclungs Board {7}. Um die RDC Performance zu zeigen und zu dokumentieren wurde eine NIOS II soft core CPU implementiert. Das ΔΣ RDC System zeigte mehr als 16 bit Rotorwinkel Auflösung bei konstanter geschwindigkeit des Servomotors.
Zusammenfassung
Da die Nachteile von spezialisierten RDC IC's überwiegen, werden diese in modernen Servoverstärkern nicht mehr eingesetzt. Diese Verstärker verwendet meist abtastende AD Wandler zur Demodulation und Digitalisierung der Resolversignale. Fügt man ein gemseenes beschleunigungssignal (oder den Motorstrom iq) hinzu, wird die Trackingschleife zu einem Lünberger Beobachter ohne Phasenverschiebung erweitert.
Der Beitrag beschreibt eine neue FPGA basierte Methode zur Konvertierung der analogen Resolversignale in digitale Positionssignale mit Hilfe der Delta Sigma Technologie. Der Delta Sigma Modulator 2ter Ordnung vergößert die Auflösung um 2 Bit verglichen mit abtastenden Wandlern. In einem Servoverstärker verhilft der deutlich höhere Störspannungsabstand zu einem ruhigeren Motorstrom (weniger Störgeräusche) oder zur Erhöhung der Bandbreite der Trackingschleife. Die Delta Sigma Modulation ermöglicht den Einsatz von digitalen Filtern (implementiert im FPGA) zur effizienten Unterdrückung von EMV Störungen durch die IGBT Endstufe.
Mit diesem Ansatz wird die Flexibilität des Software RDC Algorithmus kombiniert mit der Störsicherheit spezialisierter RDC Chips ohne Kompromisse eingehen zu müssen.
Verfasser
Prof. Dr.-Ing. Jens Onno Krah
Fachhochschule Köln
Marcel Albers
Fachhochschule Köln
Heiko Schmirgel
Kollmorgen Europe GmbH
Düsseldorf
References
- S300 manual, www.Kollmorgen.com
- 2S82 data sheet, Analog Devices www.analog.com
- J. O. Krah: Software Resolver to Digital Converter for High Performance Servo Drives. PCIM Power Conversion Intelligent Motion, Nürnberg, June 1999,pp. 301-308.
- G. Ellis, J. O. Krah: Observer-Based? Resolver Conversion in Industrial Servo Systems PCIM Power Conversion Intelligent Motion, Nürnberg, 2001, pp. 311-316.
- ADS 1204 data sheet, Texas Instruments www.ti.com
- Combining the ADS1202 with an FPGA Digital Filter for Current Measurement in Motor Control Applications, Texas Instruments application note SBAA0094.
- Altera, www.altera.com
