





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >RDP Allgemeines
Gültig für S700 / S300
Zur Konfiguration der RDP-Funktion, siehe RDP - Zahnstangenantrieb
Überblick
Auf Zahnstangenantriebe wirkende Lasten stellen besondere Anforderungen an das Servosteuerungssystem. Einerseits kommt es bei Zahnstangengetrieben zu vergleichsweise hohem Verlust von mechanischem Antrieb oder Spiel. Bei vielen Anwendungen muss die Zahnstange von zwei Motoren angetrieben werden, die Spannung oder Druck auf die Zahnstange ausüben und dazu führen, dieses Spiel zumindest bei leichter Belastung herauszunehmen. Die Drehzahlregler innerhalb der Antriebe müssen daher größtenteils unabhängig voneinander arbeiten. Andererseits sind die zwei Antriebssysteme durch die Zahnstange fest verbunden. Wenn das Flankenspiel reduziert wird, ist die durchschnittliche Geschwindigkeit für beide Motoren gleich. Durch diese Verbindung müssen keine vollständig unabhängigen, integrierenden Drehzahlregler für die beiden Antriebe eingesetzt werden. Aufgrund der besonderen Anforderungen von Lasten auf Zahnstangenantriebe müssen Systementwickler Steuerungsschemata verwenden, die speziell für den Mechanismus angelegt wurden. In diesem Dokument wird eines dieser Schemata beschrieben, das als Zahnstangenantriebspanel bezeichnet wird (Rack Drive Panel, RDP).
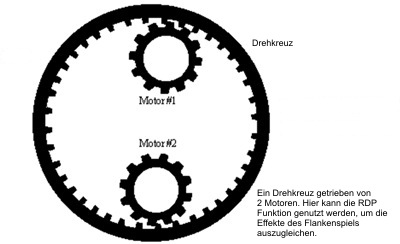
Bei RDP handelt es sich um eine Steuerungsmethode, bei der ein Regler die zwei Zahnradantriebe wie einzelne, herkömmliche Servomotoren steuern kann. RDP erleichtert die Steuerung der Zahnstange indem das Spiel bei leichter Belastung automatisch reduziert wird. Die Motoren bieten hier ein Drehmoment in entgegengesetzte Richtungen, um die Spannung oder den Druck auf die Zahnstange aufrecht zu halten. Bei starker Belastung zieht RDP automatisch einen Motor über das Flankenspiel, damit die Belastung auf beide Motoren verteilt wird. Dies ist besonders bei großer Beschleunigung wichtig, wenn die Beschleunigungslast durch RDP auf beide Motoren verteilt wird. Somit sind nur halb so große Motoren erforderlich, um bestimmte Beschleunigungen oder Widerstände gegenüber Stördrehmomenten zu erzielen, im Vergleich zu Mechanismen, bei denen die Belastung nicht auf mehrere Motoren aufgeteilt werden kann. Am Ende der Beschleunigung wird die Belastung von selbst geringer und RDP führt den Motor wieder über das Flankenspiel zurück und hält erneut die Spannung oder den Druck auf die Zahnstange aufrecht.
Da RDP zwei integrierende Drehzahlregler bereitstellt, wenn die Zahnstange unter Spannung steht, können Lasten aus beiden Richtungen über das volle Drehmoment des Motors verteilt werden. RDP stellt sicher, dass die beiden Regelkreise nicht in Konflikt geraten, wenn der Geschwindigkeitssollwert von einem Antrieb zum anderen leicht abweicht, zum Beispiel wenn ein Offset in einem A/D-Wandler zu einem leichten Fehler führt. Ohne diese Funktion laufen die beiden Drehzahlregler in entgegengesetzte Richtungen, da die integrierenden Regelkreise über leicht unterschiedliche Sollwerte verfügen, aber aufgrund der mechanischen Verbindung zu gleichen Geschwindigkeiten gezwungen werden. Solch ein Geschwindigkeitsregelkreis kann nicht erfüllt werden, bis die Regelkreise gesättigt sind.
Die Vorteile von RDP:
- Erlaubt die Steuerung der beiden Zahnstangenmotoren als einen Motor durch praktisch alle Bewegungssteuerungen sowie die Lagerregler des Antriebs
- Vermeidung von Flankenspiel bei geringer Belastung
- Starke Belastungen, beispielsweise bei hoher Beschleunigung, können auf beide Antriebe verteilt werden
- Unterstützung von zwei integrierenden Drehzahlreglern, die nicht in Konflikt geraten
- Gleichmäßige Steuerung, wenn ein Motors das Flankenspiel ausgleicht, Vermeiden von Schlagen der Gänge
Mechanisches System
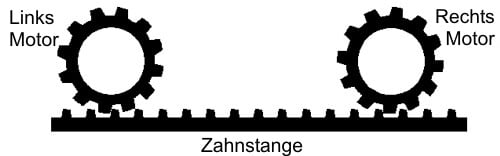
Zahnstangenantriebssysteme werden üblicherweise für größere Strecken eingesetzt. Zum Beispiel sind große Teleskope und Maschinentische oft zahnstangengetrieben. Während ein Kugelgewinde normalerweise maximal auf zwei Meter begrenzt ist, werden Zahnstangengetriebe für bis zu zehnfache Strecken eingesetzt. Die größte Schwierigkeit bei der Steuerung von Zahnstangenantriebsmechanismen ist das Flankenspiel. Die Bauweise der Zahnstangenantriebe erschwert die Aufrechterhaltung der engen Toleranzen, die zur mechanischen Reduzierung des Flankenspiels auf ein zulässiges Niveau erforderlich sind. Aufgrund der relativ niedrigen Getriebeübersetzung bei Zahnstangenantrieben werden zudem häufig Getriebe eingesetzt, die das Flankenspiel sogar vergrößern. Dies macht oft einen Antriebsmechanismus erforderlich, der das Flankenspiel wieder reduziert. Der gängigste Mechanismus setzt zwei Motoren ein, die Spannung oder Druck auf die Zahnstange ausüben. Hier ein vereinfachtes Schema der mechanischen Struktur:
Eine ähnliche Struktur wird manchmal für den Antrieb großer Kugelgewinde verwendet. Hier befindet sich ein Motor an jedem Ende des Kugelgewindes. Je nach eingesetzter Kupplung zwischen den Motoren und dem Gewinde ist Flankenspiel gegeben oder nicht. Falls Flankenspiel vorhanden ist, ist oftmals ein System zum Spielausgleich wie beispielsweise RDP erforderlich.
Im stationären Betrieb wendet der linke Motor eine Rückstellkraft auf den rechten Motor an, und umgekehrt. Dieser Druck reduziert bei gleichbleibenden Geschwindigkeiten das Spiel im System. Bei hohen Beschleunigungen wird die Last auf beide Antriebe verteilt. In diesem Fall muss einer der Motoren das Spiel überspringen, um Beschleunigungskraft (Drehmoment) bereitzustellen. Am Ende dieses Ablaufs muss der Motor, der das Spiel übersprungen hat, wieder an das andere Ende der Zahnstange zurückkehren, um es herauszunehmen. Hierfür ist eine spezielle Steuerungsstruktur erforderlich.
Servoregelkreise für Zahnstangenantriebe
Eine Lösung für Zahnstangenantriebssysteme ist es, einen Ausgleichsvorgang zwischen zwei voll integrierenden Drehzahlreglern einzusetzen. Hier wurde ein Ausgleich ergänzt. Der Ausgleichsvorgang erfolgt in zwei Schritten. Erstens: das Abtriebsdrehmoment ist die Summe aus den Abtrieben der zwei Regelkreise, so wird sichergestellt, dass der Abtrieb beider Drehzahlregler gleich ist (Ruhestrom nicht berücksichtigt). Zweitens: ein PI-Ausgleichsregler (angezeigt als KP + KI/s) stellt sicher, dass die beiden Abtriebe gleich sind (abgesehen von der Differenz, die durch IBIAS induziert wird). Der Ausgleichsregler treibt die Differenz der Abtriebe der beiden PI-Drehzahlregler auf null und stellt so sicher, dass die beiden Regelkreise nicht in Konflikt geraten.
Die RDP-Struktur stellt sicher, dass ein Antrieb das Spiel ausgleicht, um den anderen bei starker Belastung zu unterstützen. Dies geschieht, wenn die Summe der beiden Drehzahlregelkreise größer ist als IBIAS.
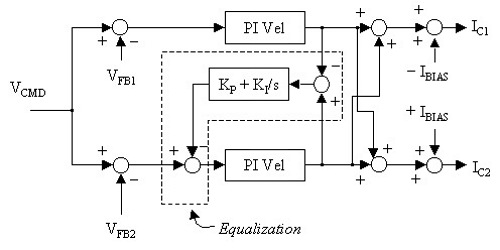
Ist die Summe der Abtriebe der beiden PI-Drehzahlregler größer als IBIAS, wechselt IC1 von negativ zu positiv. Wenn dies geschieht, ändert Antrieb 1 die Richtung und unterstützt Antrieb 2. Wenn die Summe der beiden Drehzahlregler unter –IBIAS liegt, ändert IC2 das Vorzeichen und Antrieb 2 unterstützt Antrieb 1. In beiden Fällen gilt: wenn die Belastung reduziert wird, fällt die Summe der PI-Drehzahlabtriebe unter IBIAS und das System befindet sich unter Spannung oder Druck. IBIAS ist eine Variable, die vom Benutzer konfiguriert werden kann. Es kann auf eine beliebige Stufe zwischen 0 Strom und dem Dauerstrom des Antriebs eingestellt werden. Ein größerer IBIAS hat den Vorteil, dass der Belastungsgrad bei gleichzeitiger Vermeidung von Spiel erhöht wird. Leider erhöht ein größerer IBIAS den Energieverbrauch und reduziert das Gesamtspitzendrehmoment, das der Zahnstange zur Verfügung steht.
Sobald das RDP-System installiert und konfiguriert ist, verhalten sich die beiden Achsen wie eine einzige Achse. Ein externer Regler ist lediglich für einen Antrieb zuständig. Die RDP-Konfiguration bietet das Beseitigen von Spiel, die Vermeidung von Konflikten und ein Antrieb gleicht Spiel aus, um den anderen Antrieb bei starker Belastung zu unterstützen. Der externe Regler kann eine Stellungsrückmeldung lesen und einen Drehzahl- oder Positionsbefehl an nur einen Antrieb senden. Als Schnittstelle zwischen dem externen Regler und dem ersten Antrieb kann ein Feldbus, ein Analogsignal oder digitale E/A benutzt werden.
In einigen Fällen wird ein separates Rückführsystem eingesetzt, das mit der Zahnstange verbunden ist.
Hinzufügen von Antrieben
Falls mehr als zwei Antriebe erforderlich sind, um ausreichend Drehmoment für eine Anwendung bereitzustellen, können paarweise Drehmomentantriebe ergänzt werden. Dies ist nur möglich, wenn der externe Regler die Lagerregelung vornimmt und analoge Drehzahlbefehle gleichzeitig an zwei Antriebe sendet.
Zur Konfiguration der S700 Drive RDP-Funktion, siehe RDP - Zahnstangenantrieb
