





 Startseite >
Startseite > Knowledge Base >
Knowledge Base > FAQs nach Themen >
FAQs nach Themen > Downloads >
Downloads >Multi-Feedback
Gültig für S300, S400, S600, S700
Die Servoverstärker unterstützen eine Vielzahl von Rückführsystemen. Abhängig vom Typ des Feedback wird die Rückmeldung zum Servoverstärker digital oder analog übertragen. Von KOLLMORGEN Servoverstärkern können bis zu drei Feedbacks parallel verwendet werden.
Die Funktion des Feedbacks wird mit den Parametern
- FBTYPE einstellbar auf Drivegui Bildschirmseite FEEDBACK, primäres Feedback (Motorfeedback)
- EXTPOS einstellbar auf Drivegui Bildschirmseite LAGEREGLER, sekundäres Feedback zur Positionsrückführung
- GEARMODE einstellbar auf Drivegui Bildschirmseite ELEKTR. GETRIEBE, Encoderführung für elektrisches Getriebe
in der Inbetriebnahmesoftware DRIVEGUI zugewiesen. Skalierung und weitere Einstellungen müssen ebenfalls dort vorgenommen werden.
Anschlussvarianten
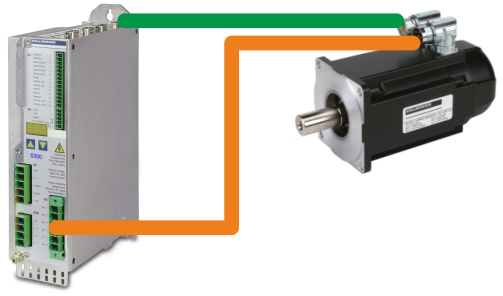
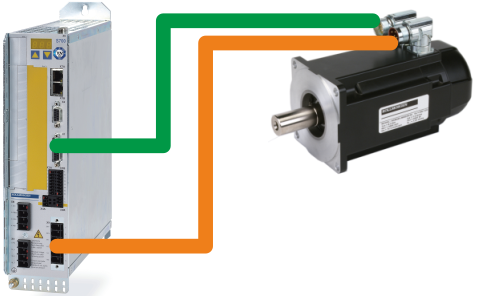
Zwei-Kabel Anschluss
Motor Leistungsversorgung und Feedbacksystem werden mit getrennten Leitungen angeschlossen. Dabei wird eine eventuell vorhandene Motorhaltebremse über Zusatzadern im motor power cable angeschlossen. Der in die Motorwicklung eingebaute Motortemperatur Sensor (PTC oder NTC Widerstand) wird über die Rückführleitungen am Servoverstärker angeschlossen.
| S300 | S700 |
|---|---|
 |
 |
  |
  |
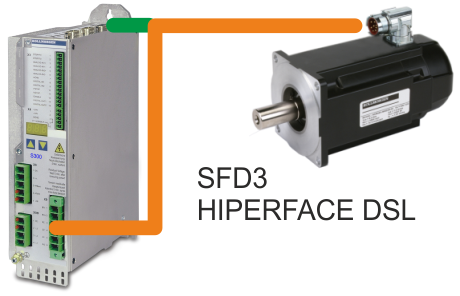
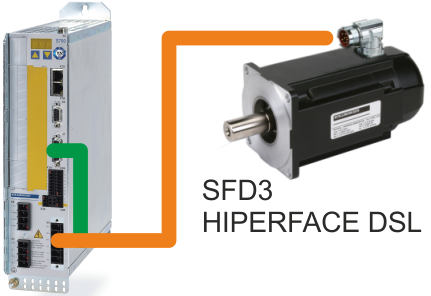
Ein-Kabel Anschluss
Verfügbar ab 31.März 2017
Motor Leistungsversorgung und Feedbacksystem werden mit einer hybrid cable angeschlossen. Dabei wird eine eventuell vorhandene Motorhaltebremse über Zusatzadern in der hybrid cable angeschlossen. Bei den digitalen Feedbacksystemen SFD3 und Hiperface DSL wird der in die Motorwicklung eingebaute Motortemperatur Sensor (PTC oder NTC Widerstand) im Geber ausgewertet und der Temperaturwert wird digital an den Servoverstärker gemeldet.
Die hybrid cable teilt sich am Servoverstärker. Im Anschlussstecker X1 (Encoderstecker) ist ein Splitter-Adapter eingebaut.
| S300 (ab HWR 4.20) | S700 (ab HWR 2.30) |
|---|---|
 |
 |
 |
 |
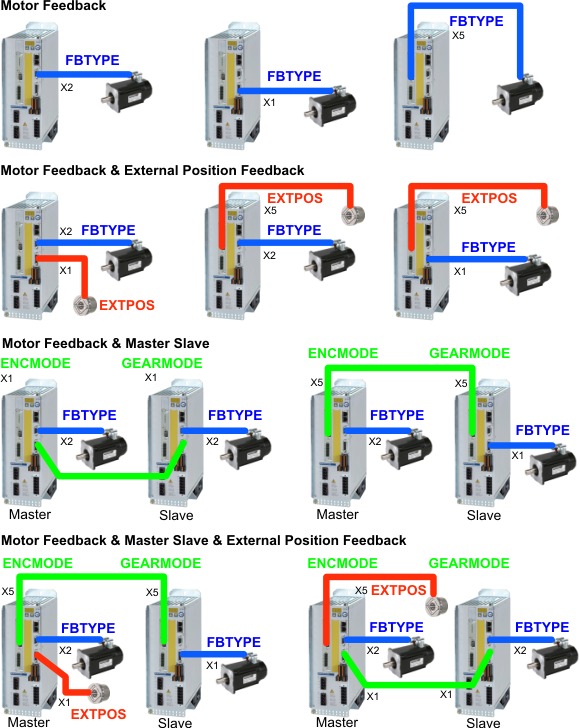
Mögliche Feedback Konfigurationen
Die folgende Grafik zeigt nur eine Auswahl an möglichen Konfigurationen, hier mit S700 Servoverstärker und AKM Motor. Stecker X1 und X2 sind im Standardgerät, X5 befindet sich beim S700 auf der Erweiterungskarte POS-IO oder Erweiterungskarte POS-IO-Monitor.
Feedback Typen
Parameter
| Parameters | |||
|---|---|---|---|
| Rückführsystem | FBTYPE (Primär) |
EXTPOS (Sekundär) |
GEARMODE |
| ResolverFeedback (2-36 polig) | 0 | - | - |
| Smart Feedback Device SFD, 4-Draht | - | - | - |
| Smart Feedback Device SFD3, 2-Draht | 36 | - | - |
| Absolutgeber mit BiSS B (5V, sincos) | 23 | - | - |
| Absolutgeber mit BiSS B (12V, sincos) | 24 | - | - |
| Absolutgeber mit BiSS B (5V, digital) | 20 | 11 | 11 |
| Absolutgeber mit BiSS B (12V, digital) | 22 | 11 | 11 |
| Absolutgeber mit BiSS C (5V, digital,m Renishaw) | 334) | 124) | 124) |
| Absolutgeber mit EnDat 2.1 mit Analogspuren SinCos | 4,21 | 8 | 8 |
| Absolutgeber mit EnDat 2.2 | 32,34 | 13 | 13 |
| Absolutgeber mit Hiperface | 2 | 9 | 9 |
| Absolutgeber mit Hiperface DSL | 35 | - | - |
| Safety Absolutgeber mit Hiperface | 2 | 9 | 9 |
| Sinus Encoder ohne Datenspur | 1,3,7,8 | 6,7 | 6,7 |
| Sinus Encoder mit Hall Geber | 5,6 | - | - |
| Sinus Encoder mit SSI | 263) (S300:283)) | - | - |
| Inkrementalgeber AquadB (5V) | 133),17,193), 27,31,30 | 10,30 | 3,10,30 |
| Inkrementalgeber AquadB (24V) | 12,16 | 2 | 2 |
| Inkrementalgeber mit Hall (5V) | 153),18 | - | - |
| Inkrementalgeber mit Hall (24V) | 14 | - | - |
| Absolute Encoder mit SSI | 93),253) | 53),253) | 5,25 |
| Hall Sensors | 11 | - | - |
| Step Direction interface (5V) | - | 4,27 | 4,27 |
| Step Direction interface (24V) | - | 1 | 1 |
| Sensorless (ohne Feedback) | 10 | - | - |
| DRIVE-CLiQ | - | - | - |
Servoverstärker
| Drives | ||||||
|---|---|---|---|---|---|---|
| Feedback | S300 | S400 | S600 | FBTYPE | AKD Drive | |
| ResolverFeedback (2-36 polig) | P | P | P | P | 40 | P |
| Smart Feedback Device SFD, 4-Draht | - | - | - | - | 41 | P |
| Smart Feedback Device SFD3, 2-Draht | P | - | - | P | - | - |
| Absolutgeber mit BiSS B (5V, sincos) | P | P | P | P | 32 | P |
| Absolutgeber mit BiSS B (12V, sincos) | P | - | P | P | - | - |
| Absolutgeber mit BiSS B (5V, digital) | P S | - | - | P S | - | - |
| Absolutgeber mit BiSS B (12V, digital) | P S | - | - | P S | - | - |
| Absolutgeber mit BiSS C (5V, digital,m Renishaw) | P4) S4) | - | - | P4) S4) | - | P4) |
| Absolutgeber mit EnDat 2.1 mit Analogspuren SinCos | P S | P | P | P S | 30 | P |
| Absolutgeber mit EnDat 2.2 | P S | - | - | P S | 31 | P S |
| Absolutgeber mit Hiperface | P S | P | P | P S | 33 | P |
| Absolutgeber mit Hiperface DSL | P | - | - | P | - | x |
| Safety Absolutgeber mit Hiperface | P S | P | P | P S | ||
| Sinus Encoder ohne Datenspur | P S | P S | P S | P S | 21 | P |
| Sinus Encoder mit Hall Geber | P | P | P | P | 20 | P |
| Sinus Encoder mit SSI | P | - | - | P | - | - |
| Inkrementalgeber AquadB (5V) | P S | P S | P S | P S | 11 | P S |
| Inkrementalgeber AquadB (24V) | P S | P S | P S | P S | - | S |
| Inkrementalgeber mit Hall (5V) | P | P | P 1) | P | 10 | P |
| Inkrementalgeber mit Hall (24V) | P | P | P 1) | P | - | - |
| Absolutgeber mit SSI | P S 2) | S | S | P S | - | - |
| Hall Geber | P | - | P 1) | P | - | - |
| Puls-Richtungs-Interface (5V) | S | S | S | S | - | S |
| Puls-Richtungs-Interface (24V) | S | S | S | S | - | S |
| Sensorlos (ohne Feedback) | P | P | P | P | - | - |
| DRIVE-CLiQ | - | - | - | - | ||
Motoren
| Motoren | ||||||
|---|---|---|---|---|---|---|
| Feedback | AKM | AKMH | VLM | DBL/DBK | CDDR | KBM |
| ResolverFeedback (2-36 polig) | x | x | x | x | ||
| Smart Feedback Device SFD, 4-Draht | x | x | x | |||
| Smart Feedback Device SFD3, 2-Draht | x | x | ||||
| Absolute Encoder mit BiSS B (5V, sincos) | x | x | ||||
| Absolute Encoder mit BiSS B (12V, sincos) | ||||||
| Absolute Encoder mit BiSS B (5V, digital) | ||||||
| Absolute Encoder mit BiSS B (12V, digital) | ||||||
| Absolute Encoder mit BiSS C (5V, digital,m Renishaw) | ||||||
| Absolute Encoder mit EnDat 2.1 mit Analogspuren SinCos | x | x | x | x | ||
| Absolute Encoder mit EnDat 2.2 | ||||||
| Absolute Encoder mit Hiperface | x | x | ||||
| Absolute Encoder mit Hiperface DSL | x | x | ||||
| Safety Absolute Encoder mit Hiperface | x | |||||
| Sine Encoder ohne Datenspur | ||||||
| Sine Encoder mit Hall Geber | ||||||
| Sine Encoder with SSI | ||||||
| Incremental Encoder AquadB (5V) | ||||||
| Incremental Encoder AquadB (24V) | ||||||
| Incremental Encoder with Hall (5V) | x | x | x | |||
| Incremental Encoder with Hall (24V) | ||||||
| Absolute Encoder mit SSI | ||||||
| Hall Geber | x | x | ||||
| Puls-Richtungs-Interface (5V) | ||||||
| Puls-Richtungs-Interface (24V) | ||||||
| Sensorlos (ohne Feedback) | ||||||
| DRIVE-CLiQ | x | |||||
P = primäres Feedback
S= sekundäres Feedback
1) S601-620 mit Hall Dongle
2) nur über X5
3) Versorgungsspannung des Gebers auf X1 einschalten: ENCVON auf 1 setzen
4) BiSS C Geber von Hengstler werden nicht unterstützt. Renishaw Geber werden unterstützt.
Genauigkeit
Die Genauigkeit (Auflösung) der verschiedenen Rückführsysteme ist unterschiedlich.
- S300 (HWR <4.0), S400, S600: siehe Seite Feedback Genauigkeit.
- S300 (HWR >=4.00), S700: siehe Seite Feedback Genauigkeit S700.
Sicherheitstechnische Kennzahlen
Die Feedbacksysteme haben unterschiedliche MTTFD Werte und führen damit zu unterschiedlichen sicherheitstechnischen Bewertungen. Siehe Seite Safety Characteristic Data.
Zulässige Kabellängen
Die ausreichende 5V Versorgung der Feedbackgeräte wird meist mit 2 Senseleitungen überwacht/nachgeregelt. Abhängig vom Geberhersteller sind die Brücken +5V => Sense+ und 0V => Sense- im Geber selbst realisiert oder müssen im Anschlussstecker eingebaut werden. Insbesondere bei langen Kabeln hängt die Funktion des Feedbacks von korrekt angeschlossenen Sense Leitungen ab.
| S300 | S400 | S600 | S700 | AKD | |
|---|---|---|---|---|---|
| Resolver | 100m | 25m | 100m | 100m | 100m |
| SFD | - | - | - | - | 100m |
| SFD3 | 25m | - | - | 25m | |
| Absolutgeber mit BiSS | 50m | 50m | 50m | 50m | 50m |
| Absolutgeber mit EnDat | 50m | 25m | 50m | 50m | 50m |
| Absolutgeber mit Hiperface | 50m | 25m | 50m | 50m | 50m |
| Hiperface DSL | 25m | - | - | 25m | |
| Absolutgeber mit SSI | 50m | 50m | 50m | 50m | - |
| Sine Encoder | 50m | 50m | 50m | 50m | 25m |
| Sinus Encoder mit Hall | 25m | 25m | 25m | 25m | 25m |
| Sinus Encoder mit SSI | - | - | - | 50m | - |
| Inkrementalgeber 5V | 50m | 50m | 50m | 50m | 25m |
| Inkrementalgeber 24V | 25m | 25m | 25m | 25m | - |
| Inkrementalgeber mit Hall | 25m | 25m | 25m | 25m | 25m |
| Hall Geber | 25m | - | 25m | 25m | - |
| Puls Richtungs Interface | 25m | 25m | 25m | 25m | 25m |
Abschlusswiderstände
Übersicht der Abschlusswiderstände für die RS485 Eingänge und Differenzeingänge:
| S300 | S400 | S600 | S700 | AKD | ||||
|---|---|---|---|---|---|---|---|---|
| HWR 2/3 | HWR 4 | X1 | X5 | X10 | ||||
| SFD, SFD3 | - | - | - | - | - | - | 0 | |
| Sinus Encoder | 0 | 0 | 0 | 0 | 0 | - | ext | |
| Absolutgeber mit BiSS analog | 0 | 0 | 0 | 0 | 0 | - | 0 | |
| Absolutgeber mit BiSS digital | 0 | 0 | - | - | 0 | - | - | |
| Absolutgeber mit EnDat 2.1 | 0 | 0 | 0 | 0 | 0 | - | 0 | |
| Absolutgeber mit EnDat 2.2 | - | 0 | - | - | 0 | 0 | ||
| Absolutgeber mit Hiperface | 0 | 0 | 0 | 0 | 0 | - | 0 | |
| Absolutgeber mit SSI | ext | 0 | ext | ext | 0 | ext | - | |
| Inkrementalgeber 5V 1.5MHz | ext | Kanal A: ext Kanal B: 0 |
ext | ext | Kanal A: ext Kanal B: 0 |
ext | 0 | |
| Inkrementalgeber 5V 350 kHz | 0 | 0 | - | - | 0 | - | - | |
- = nicht verfügbar
0 = keine ext. Widerstände erforderlich
ext = externe Widerstände erforderlich
